

Topological optimization method for survivability unmanned aerial vehicle group based on position and double key nodes
A key node and topology optimization technology, applied in the direction of location information-based services, specific environment-based services, wireless communication, etc., can solve the problem that the overall performance improvement of cluster network invulnerability has not played a greater role in promoting, and cannot UAV spacing, configuration control, and invulnerability performance are difficult to meet the needs, so as to achieve low power consumption, stable network topology, and improve network invulnerability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0050] For the existing UAV cluster communication network node power consumption is difficult to accurately control, the power consumption of each node is unbalanced, and the overall power consumption is relatively high, and the communication network is not invulnerable, and it is easy to collapse after encountering interference or attack, resulting In the case of large losses, this embodiment proposes a UAV swarm topology optimization method to solve the existing technical problems.
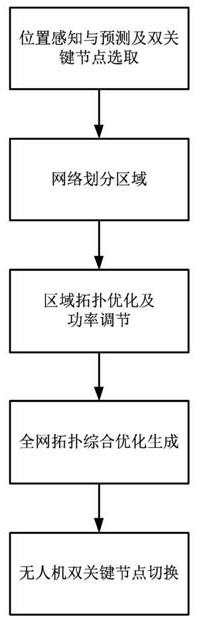
[0051] Specifically, such as figure 1 Shown, the scheme disclosed in this embodiment is as follows:
[0052] A topology optimization method for survivable UAV swarms based on location and dual key nodes, including:
[0053] Obtain the current position of each node in the UAV cluster network, and the position trajectory of each node at the next moment, and determine the distance and topology between the current node and surrounding nodes;
[0054] Divide the UAV cluster communication network in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More