

A bionic flexible propulsion device and wave control method
A technology of a propulsion device and a control method, applied in the field of underwater bionic propulsion drive, can solve the problems of increasing the size and weight of the aircraft, affecting the navigation performance, changing the aircraft, etc., so as to improve the concealment, have a wide application prospect, and prolong the life. effect of cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
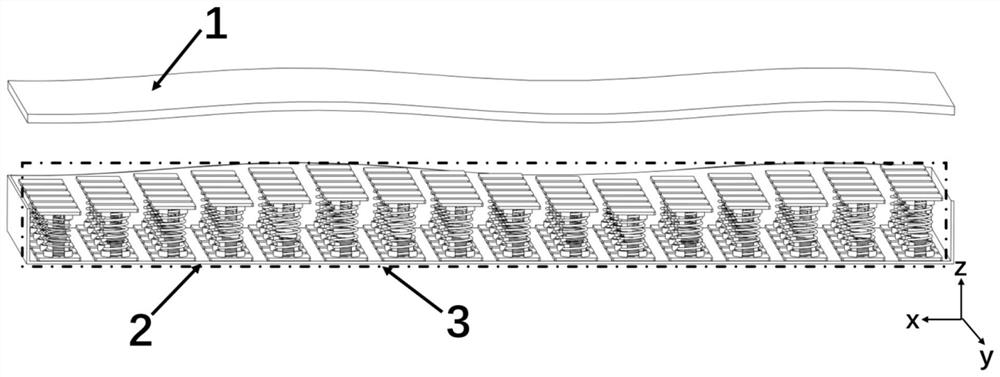
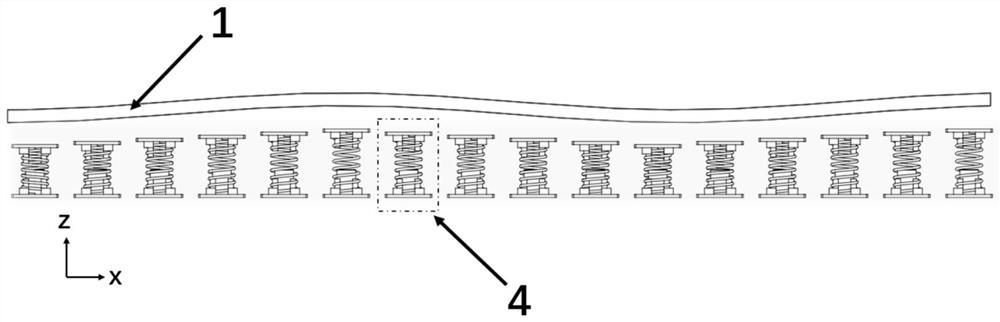
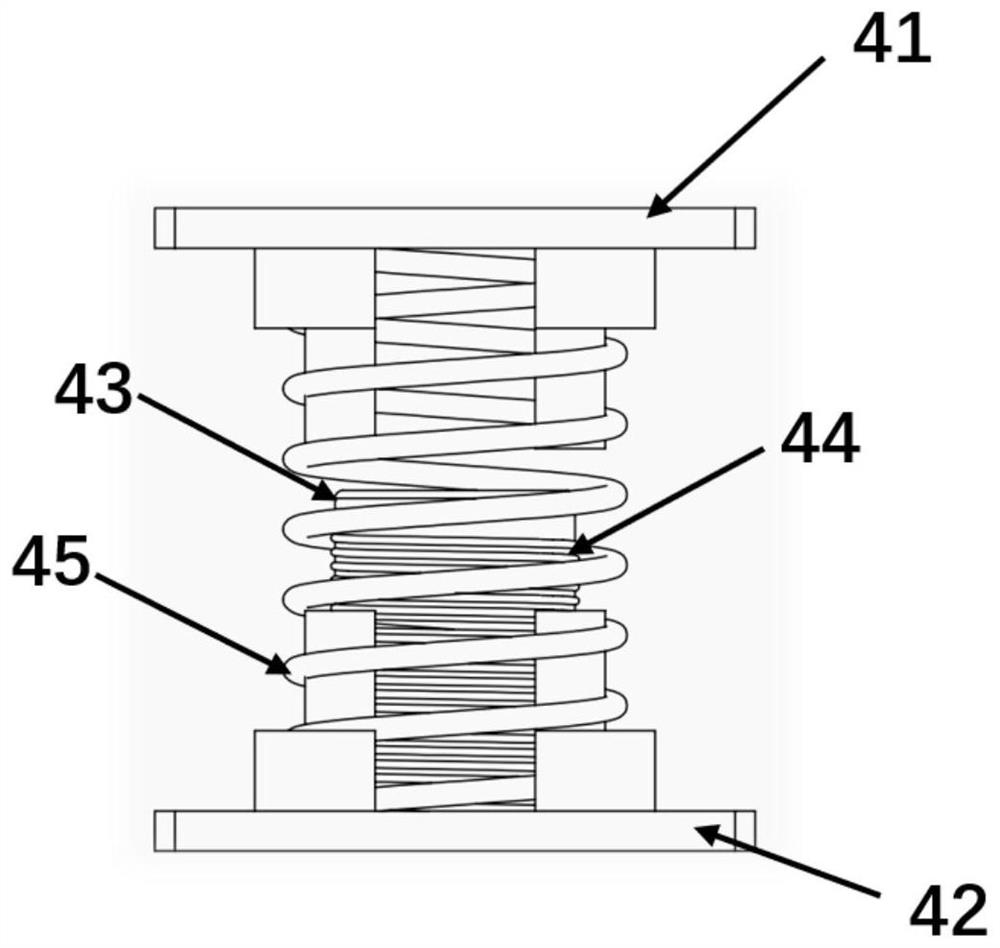
[0066]In this embodiment, the bionic flexible propulsion device is a 16×6 array composed of 96 driving devices 4, and the 6 driving devices 4 in the same column adopt a synchronous control mode, and their driving voltages are the same in real time to realize synchronous movement; 16 driving devices 4 in the same row Each magnetically controlled shape memory alloy spring adopts an independent control method, and an independent driving voltage signal is applied to each magnetically controlled shape memory alloy spring 45; two bionic flexible propulsion devices are respectively attached to a sailing boat with a length of 50cm, a width of 20cm, and a height of 30cm. On the left and right surfaces of the device, the external power source is connected to the waterproof conduit line to supply power to the excitation coil of the magnetic control shape memory alloy spring drive device. The amplitude of the shape-memory alloy spring 45 reaches 1.5cm, adjust the driving voltage frequency ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More