

Method and device for detecting obstacles in 3D radar point cloud continuous frame data
A technology of point cloud data and obstacles, which is applied in the field of obstacle detection, can solve the problems of missing labels, reducing the work efficiency of labelers, and wrong labeling by labelers, so as to reduce workload, improve accuracy and efficiency, and improve labeling efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Reference will now be made in detail to the exemplary embodiments, examples of which are illustrated in the accompanying drawings. When the following description refers to the accompanying drawings, the same numerals in different drawings refer to the same or similar elements unless otherwise indicated. The implementations described in the following exemplary examples do not represent all implementations consistent with the present invention. Rather, they are merely examples of apparatuses and methods consistent with aspects of the invention as recited in the appended claims.
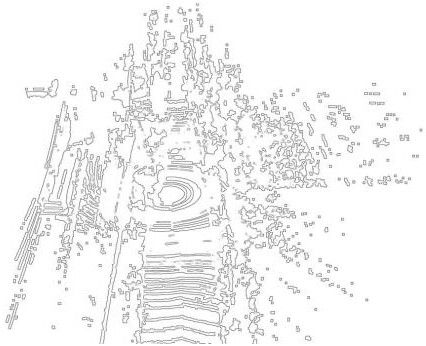
[0052] At present, the common obstacle detection method of point cloud data is manually marked. In purely manual marking, if the point cloud data is not pre-classified and detected, such as figure 1 As shown, the color of the point cloud data is the same, and a uniform color will reduce the work efficiency of the annotator, and even cause the annotator to mislabel and miss the label.
[0053] R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More