

Multi-task cooperation and information synchronization method for mechanical arm system in high-speed continuous movement
An information synchronization, robotic arm technology, applied in multi-programming devices, program startup/switching, program control design, etc., can solve the problems of increasing data density and the difficulty of matching between data, reducing the amount of calculation and occupying less resources , the effect of reducing system resource consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] Preferred embodiments of the present invention are described in detail below in conjunction with the accompanying drawings, but the following embodiments are only illustrative, and the protection scope of the present invention is not limited by these embodiments.
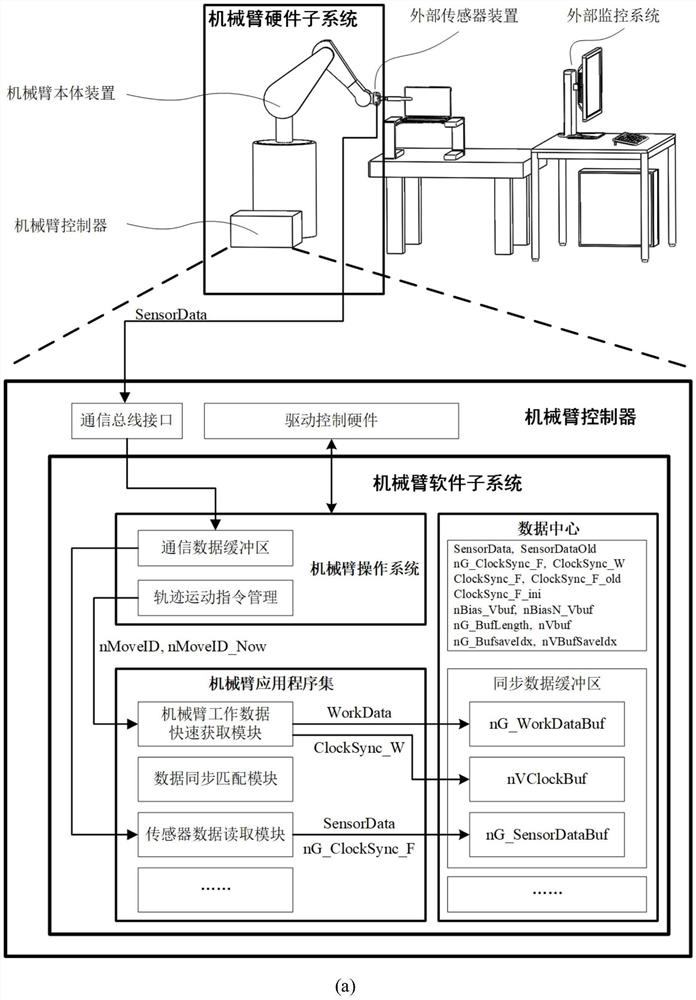
[0089] Such as figure 1As shown, the whole robotic arm system includes two parts: the robotic arm hardware subsystem and the robotic arm software subsystem. The hardware subsystem of the manipulator includes the main body device of the manipulator, the controller of the manipulator and the external sensor device; the controller of the manipulator includes a communication bus interface; the external sensor device establishes a communication connection with the controller of the manipulator through the communication bus interface, and the external sensor device can High-speed periodic sensing sampling and sending sensing data, the frequency of sensing sampling and sensing data sending is preset by the user, for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More