Spraying robot time optimal trajectory planning method based on dynamics
A spraying robot, time-optimized technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low efficiency, inapplicable dynamic models, and non-universal numerical integration methods, so as to improve work efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0060] Embodiment: The spraying robot completes a section of arc trajectory in Cartesian space
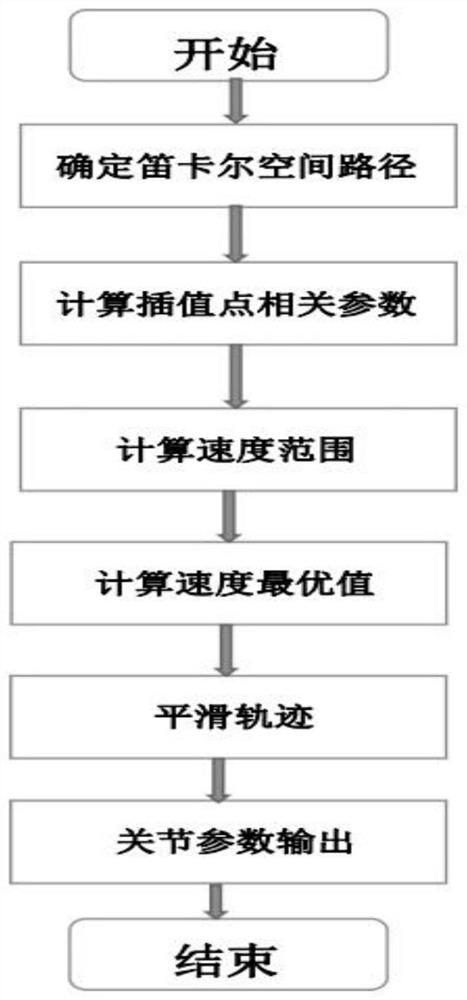
[0061] The specific time optimal trajectory planning method is as follows:
[0062] Step 1. Given the Cartesian space path: the teach pendant is given three teaching points, and the positions and attitudes are P1(x 1 ,y 1 ,z 1 , α 1 , β 1 , gamma 1 ), P2(x 2 ,y 2 ,z 2 , α 2 , β 2 , gamma 2 ), P3(x 3 ,y 3 ,z 3 , α 3 , β 3 , gamma 3 ). Among them, the first three coordinates in the coordinates represent the spatial position, and the last three coordinates use Euler angles to represent the attitude;
[0063] Step 2. Calculate the relevant parameters of the interpolation point:
[0064] 2.1 The number of interpolation points: take the value according to the length l of the arc path, and the value formula is n=m×l, where m is the empirical coefficient;
[0065] 2.2 Determine the center and radius of the circle, convert the space arc into a plane arc, and use the meth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More