

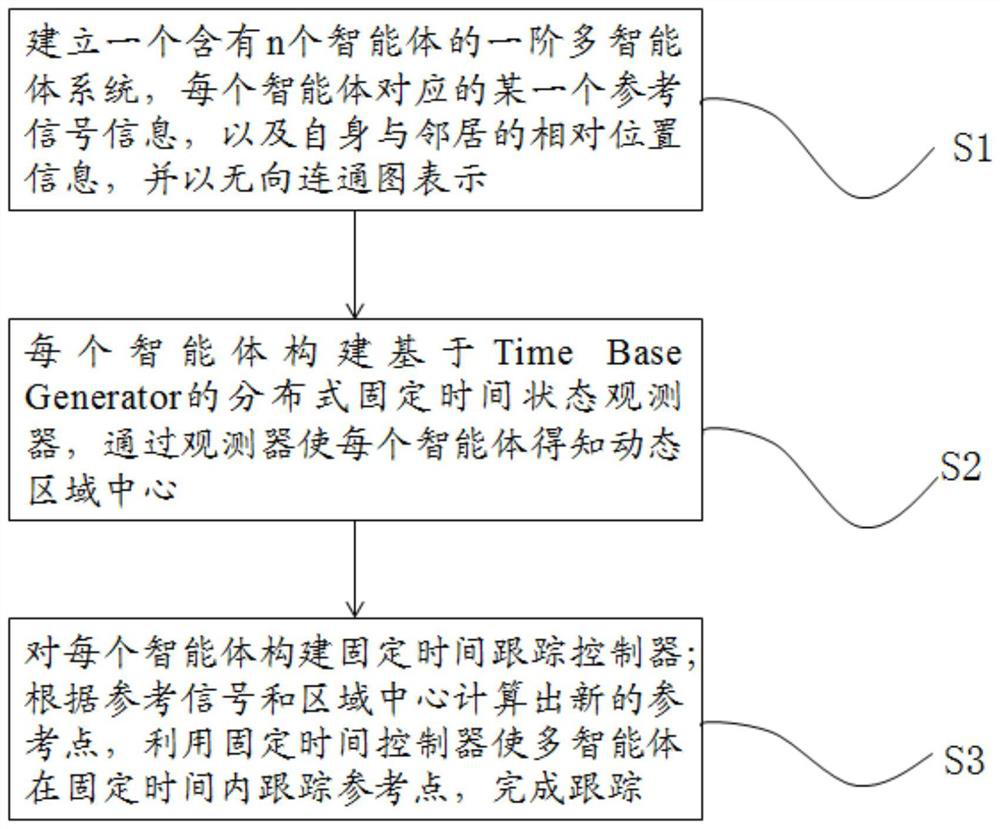
A Fixed Time Dynamic Area Tracking Control Method Based on Time Base Generator
A fixed time, dynamic region technology, applied in adaptive control, comprehensive factory control, general control systems, etc., can solve the problems of tracking dynamic region, inability to accurately estimate the upper bound of the system stability time, etc., to achieve small initial control input, Simple application of system instability, the effect of improving the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
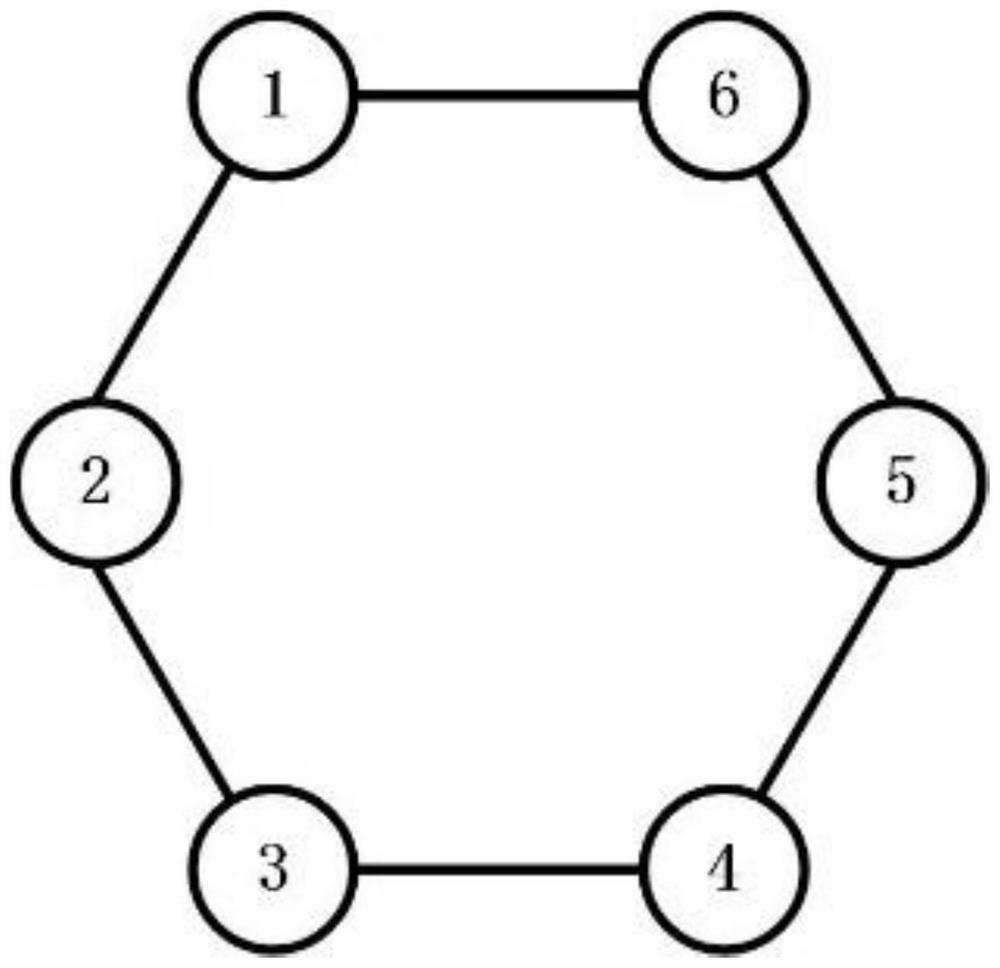
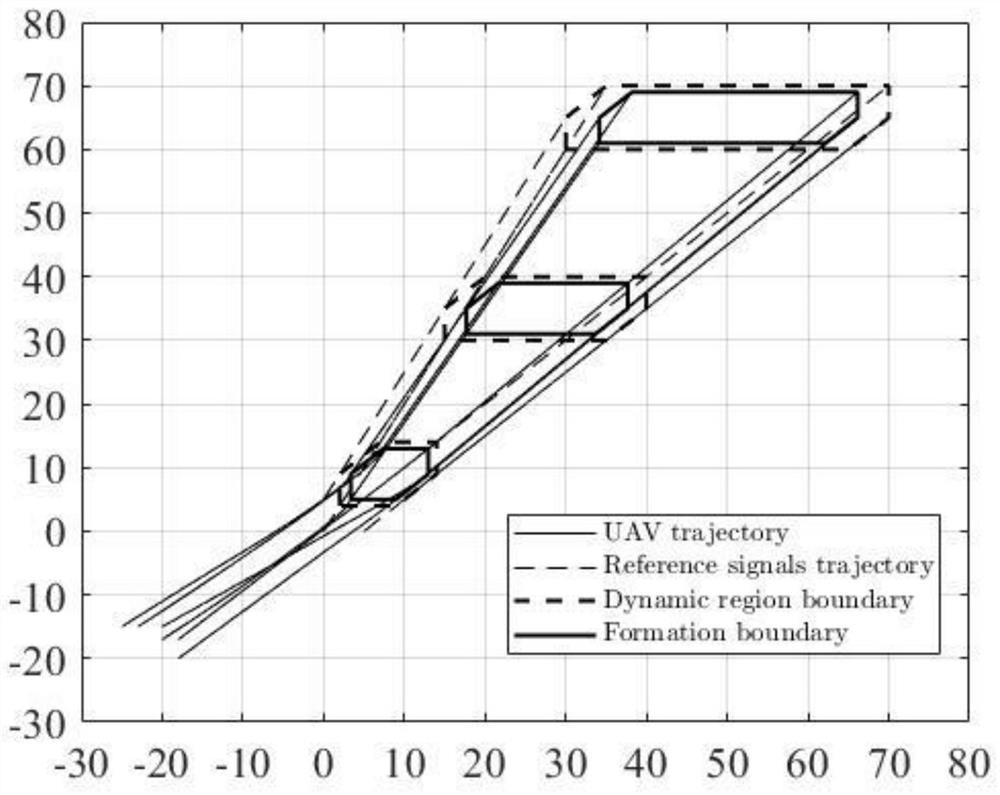
[0077] Assume a first-order integrator type multi-agent system with 6 agents, the system model is shown in formula (2), the observer and controller are shown in formula (5) and formula (7) respectively, the system network communication topology like figure 2 shown, the upper bound of the settling time is set to t s =4s, the remaining parameters θ=2, κ=2, δ=0.01, a=0.8, the initial state of the system is set to (x 1 ,y 1 )=(-20,-17), (x 2 ,y 2 )=(-25,-15), (x 3 ,y 3 )=(-18,-15), (x 4 ,y 4 )=(-18,-17), (x 5 ,y 5 )=(-20,-15), (x 6 ,y 6 )=(-18,-20); the reference signal is (r 1x ,r 1y )=(0.5t,t), (r 2x ,r 2y )=(0.5t,t+5), (r 3x ,r 3y )=(0.5t+5,t+10), (r 4x ,r 4y )=(t+10,t+10), (r 5x ,r 5y )=(t+10,t+5), (r 6x ,r 6y )=(t+5,t), the dynamic curve of the simulation results is as follows image 3 shown; the states of the multi-agent system at 0s, 4s, and 30s are respectively as follows Figure 4 , Figure 5 , Image 6 shown. It can be seen from the simulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More