

Depth camera and single-line laser radar fused mobile robot obstacle avoidance method
A single-line laser radar and mobile robot technology, applied in the field of robotics, can solve the problems of low cost, inability to obtain environmental data on the back and left and right sides, etc., to improve the robustness and make up for the defects of detection angle range and detection accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below in conjunction with the embodiments and accompanying drawings, but the present invention is not limited thereto.
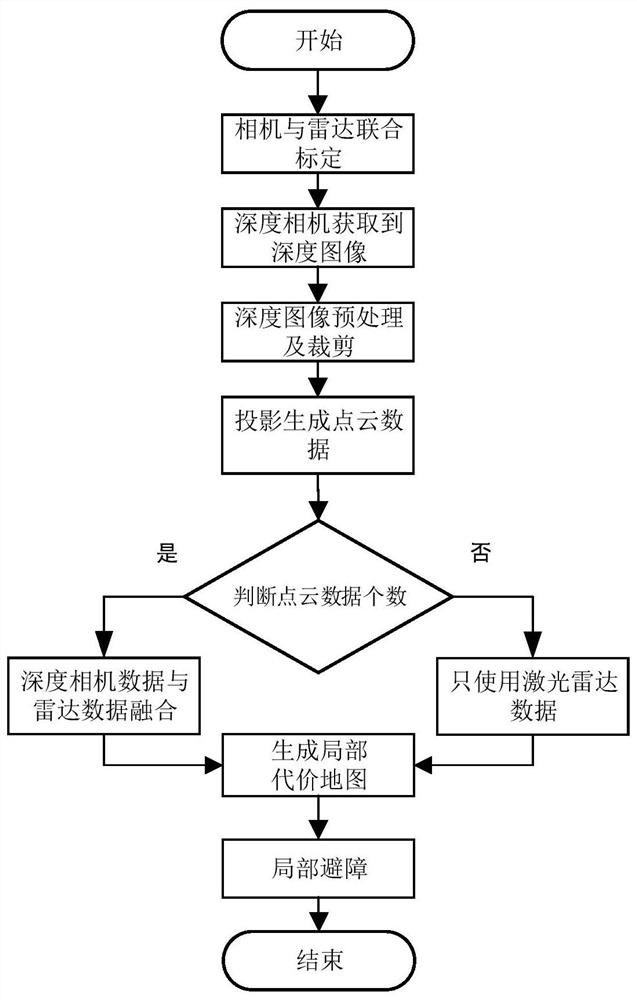
[0042] The implementation of the mobile robot obstacle avoidance method combined with the depth camera and the single-line laser radar of the present invention is based on the robot operating system ROS platform. The steering structure of the robot is two-wheel differential steering, the depth camera uses Intel RealSense D435i depth camera, and the single-line lidar uses Silan Rplidar A1. The robot uses Nvidia's AI edge computing platform Jetson Xavier NX as the main controller, and the operating system is Ubuntu18.04+ROSMelodic. The coordinate systems x, y, and z correspond to the left-right, up-down, and front-back directions of the robot camera, respectively. Among them, the coordinate system z describes the positional relationship of the robot relative to obstacles, and the height information desc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More