

Force feedback main manipulator and puncture surgery robot system
A main operator and force feedback technology, applied in surgical navigation systems, surgical manipulators, surgical robots, etc., can solve problems such as the inability to effectively simulate live puncture, and achieve the goal of improving the success rate of surgery, improving the user experience, and ensuring the safety of patients. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
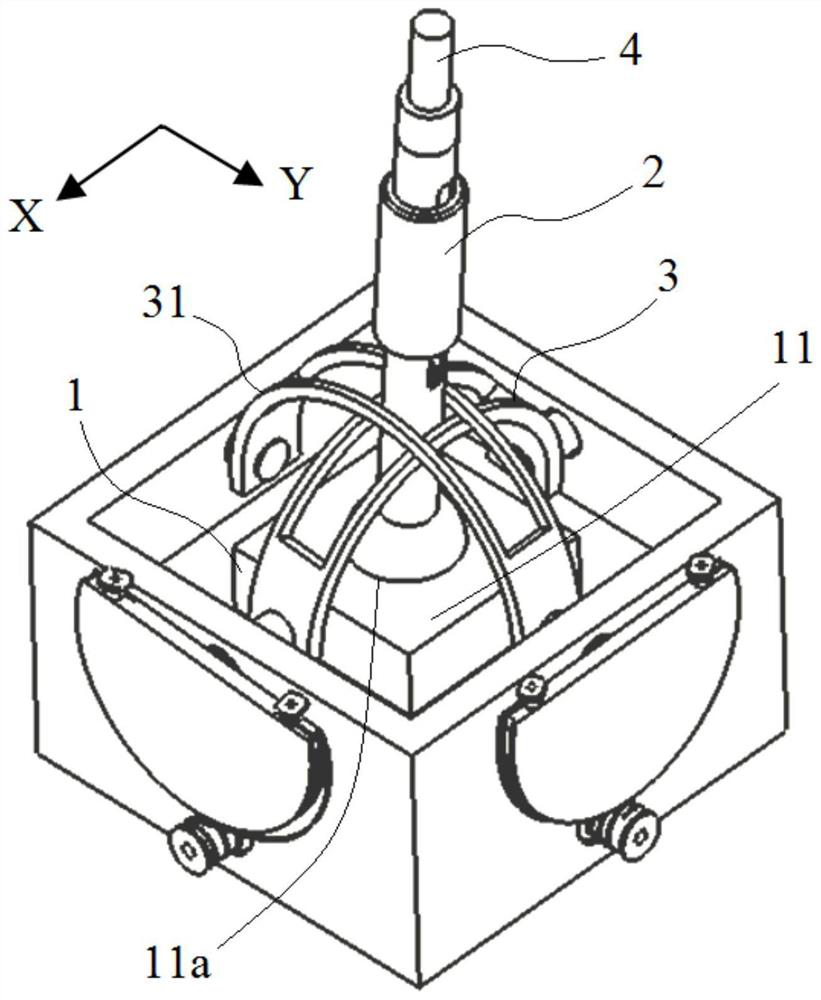
[0029] like figure 1 As shown, this embodiment discloses a force feedback master operator 100 , which includes a base 1 , an operating device 2 , an attitude adjustment device 3 and a force feedback device 4 .
[0030] Wherein, the base 1 is used to support and carry the entire main operator 100, and has a mounting end surface 11, preferably, the mounting end surface 11 is located at the upper end of the base.
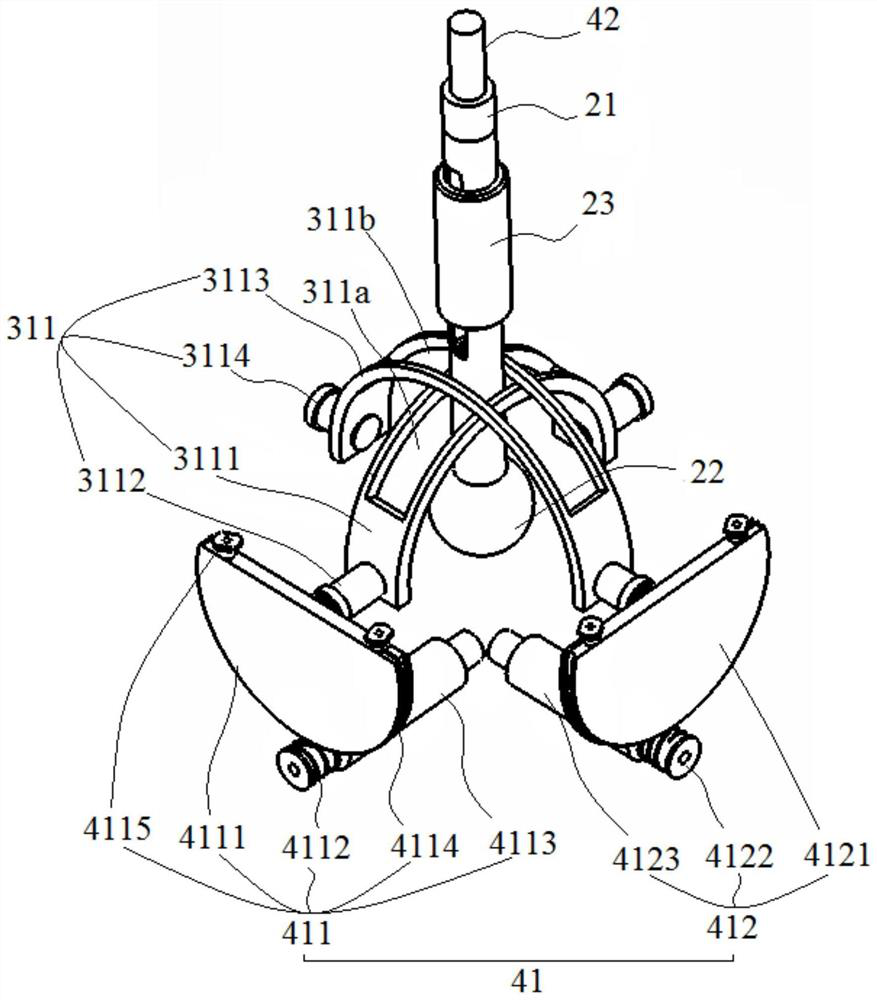
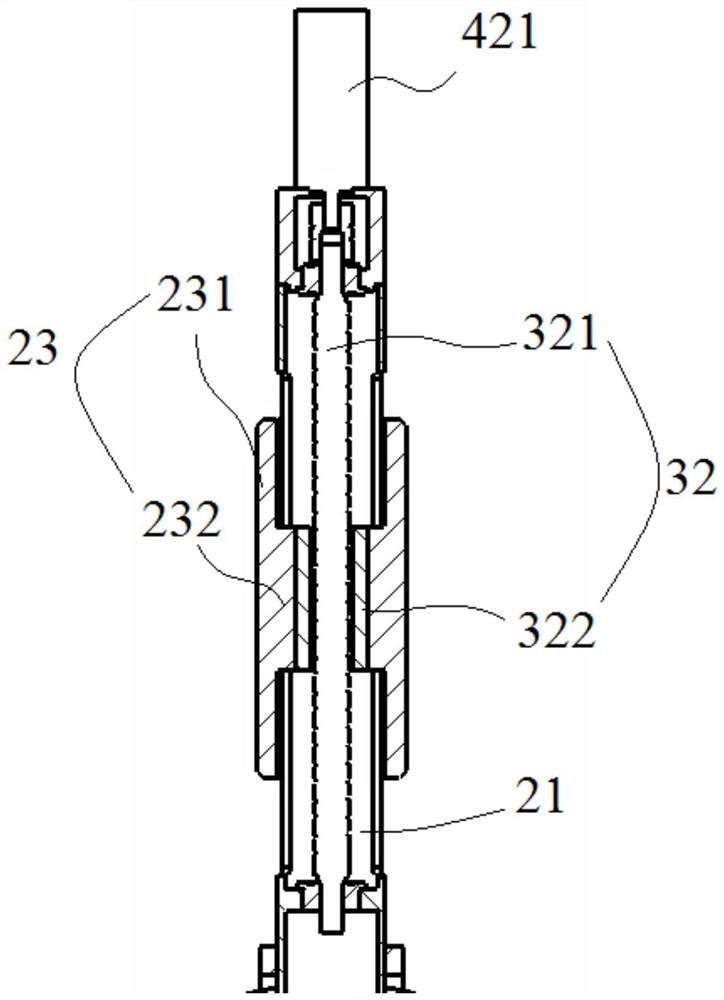
[0031] combine figure 2 As shown, the operating device 2 includes a connecting rod 21, a hinge part 22 and a handle 23, the hinge part 22 is located at one end of the connecting rod 21, and the end of the connecting rod 21 away from the hinge part 22 is away from the installation The end surface 11 is set, and the connecting rod 21 can rotate on the installation end surface 11 with the hinge part 22 as the center of rotation; in this embodiment, the hinge part 22 is located at the lower end of the connecting rod 21; the connecting rod 21 passes through the The hinge...
Embodiment 2
[0056] like figure 1 and Figure 5 As shown, this embodiment discloses a puncture surgery robot system, which includes a master operator 100, a slave operator 200, and a communication device 300 as described in the embodiment, wherein the slave operator 200 communicates with the operator through the communication device 300 The force feedback device 4 realizes the transmission of force or torque.
[0057] combine figure 2 In some embodiments, the above-mentioned first feedback motor 4113, second feedback motor 4123, and third feedback motor 421 are all connected to the communication device 300 through a control system 50, and the force applied by the user on the handle 23 of the main operator 100 is passed through After being decomposed, they are respectively transmitted to the first feedback motor 4113, the second feedback motor 4123 and the third feedback motor 421, and at the same time, the resistance from the operation hand 200 is passed through the first feedback motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More