

Fire explosion driven rigid-flexible coupling frog-imitating robot
A rigid-flexible coupling and robot technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as jumping posture, uncontrollable landing direction, and unstable landing, so as to increase bionics, solve unstable landing, and high safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
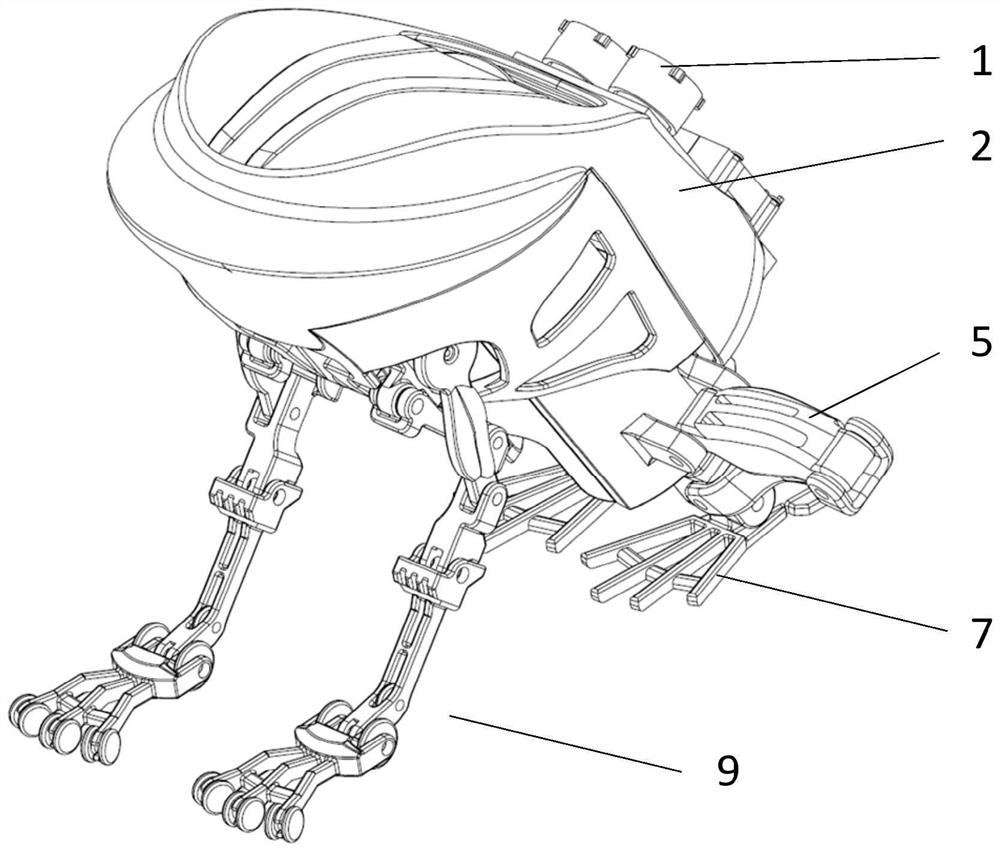
[0044] Specific implementation mode one: the following combination Figure 1 to Figure 7 This embodiment is described. The rigid-flexible coupled frog-like robot driven by detonation described in this embodiment includes a detonation drive unit, a fuselage shell 2, a forelimb module and a hindlimb module;
[0045] The detonation drive unit is arranged in the fuselage shell 2; the fuselage shell 2 is a structure with openings in both the lower part and the rear part;
[0046] The detonation drive unit utilizes the instantaneous impact force of the gas generated when the gas fuel is detonated to provide power for the hind limb module to jump forward; the forelimb module and the rear module are respectively arranged at the front and rear of the lower side of the fuselage;
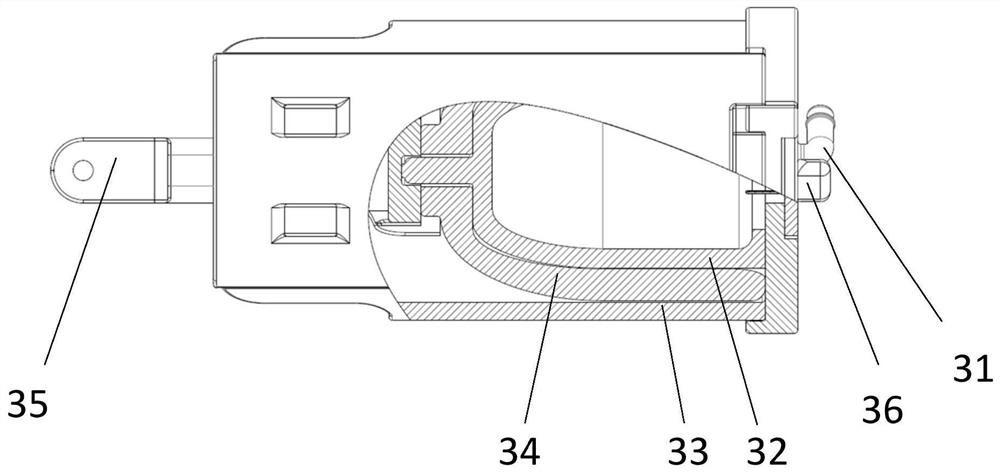
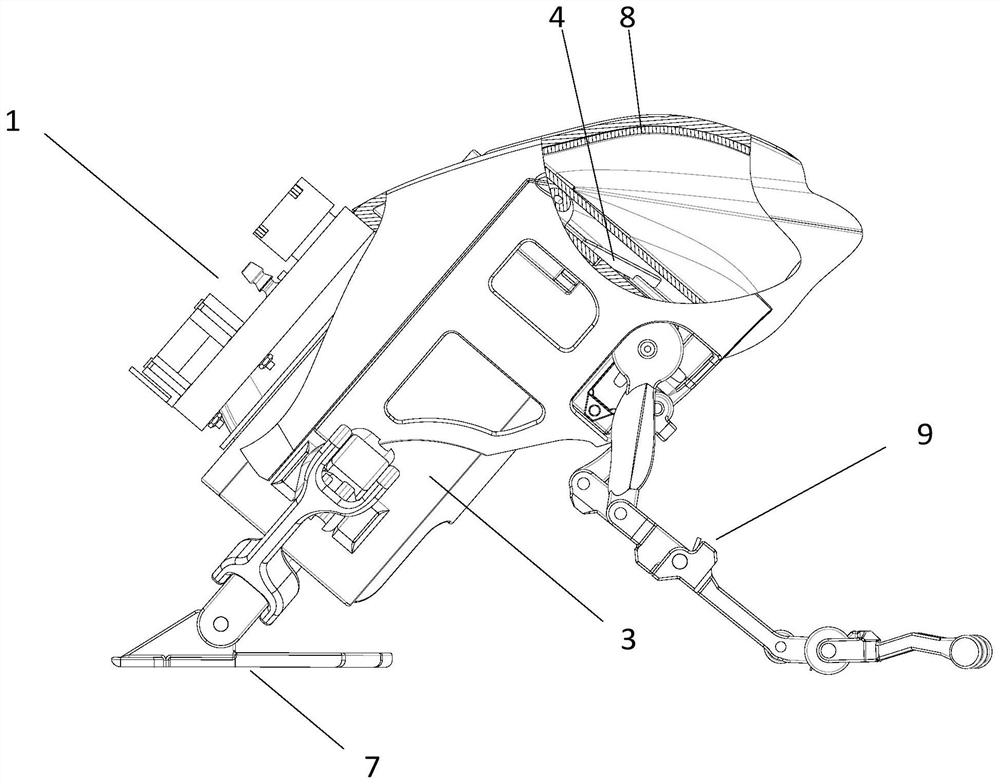
[0047] The detonation driving unit includes a gas transmission device 1, a rigid-flexible coupling detonation driver 3, an air pump and a soft airbag 4;
[0048] The rigid-flexible coupling detonation driver ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More