A humanoid robot jumping and landing state detection system and method
A humanoid robot and state detection technology, applied in the field of humanoid robots, can solve the problems of few robots, the difficulty of real-time detection of the collision between the robot and the ground, and the difficulty of controlling the switching of the robot's motion state when landing stably, achieving precise control, easy to control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
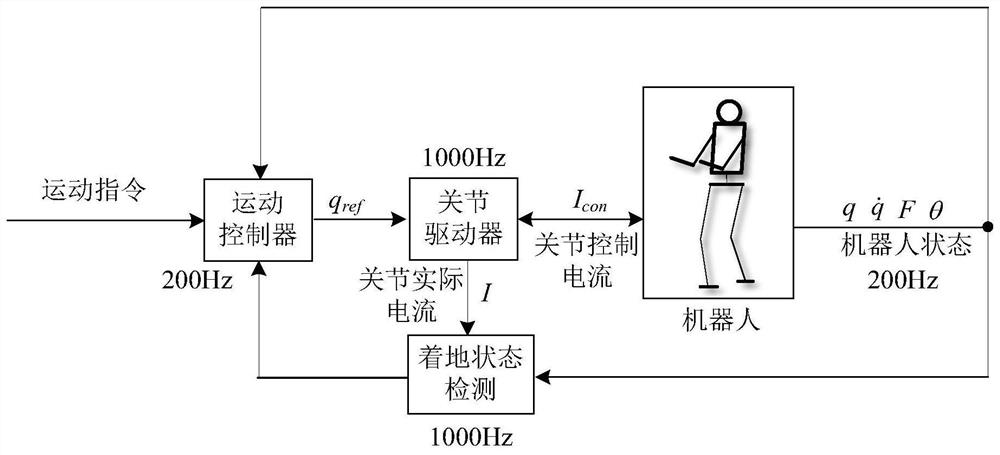
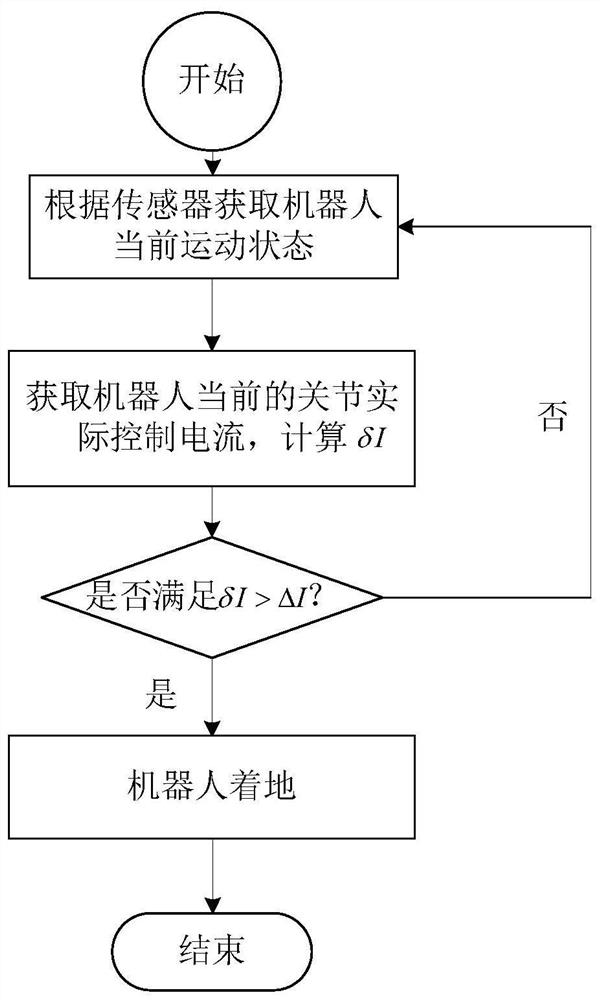
[0032] Aiming at the problem of landing detection and state estimation after the humanoid robot takes off, the present invention proposes a landing detection method based on robot motion state change detection and collision detection, and calculates the body posture of the robot at the time of landing to provide necessary control parameters and parameters for robot landing control. Control state switching.
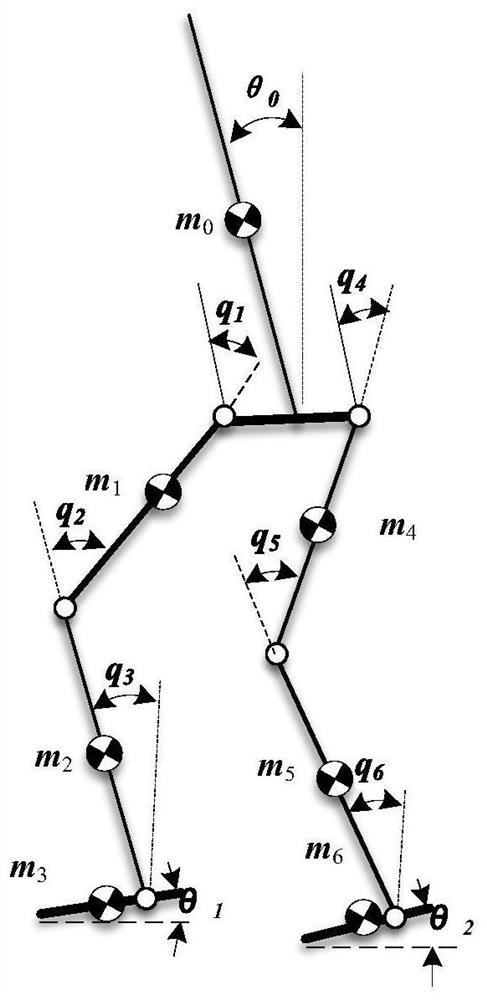
[0033] The humanoid robot in this embodiment has structures such as arms, torso, legs, and feet, and can rely on the legs to move and complete walking, jumping, running, and other moving modes. A six-dimensional force / torque sensor is installed on the ankle of the robot, which can measure the contact force F between the sole of the robot and the ground. The torso of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More