

Four-rotor unmanned aerial vehicle visual servo control method using disturbance observer and nonlinear speed observer
A technology of quadrotor UAV and disturbance observer, which is applied in the field of visual servo control and can solve problems such as disturbance and speed observation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions in the implementation of the present invention will be clearly and comprehensively described below in conjunction with the accompanying drawings in the implementation of the present invention. It appears that the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
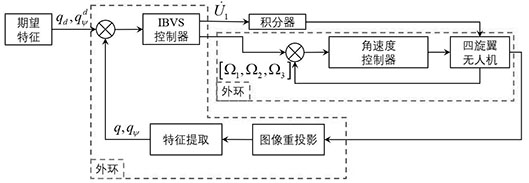
[0054] A visual servo control method for a quadrotor UAV using a disturbance observer and a nonlinear velocity observer provided by the present invention includes the following steps:
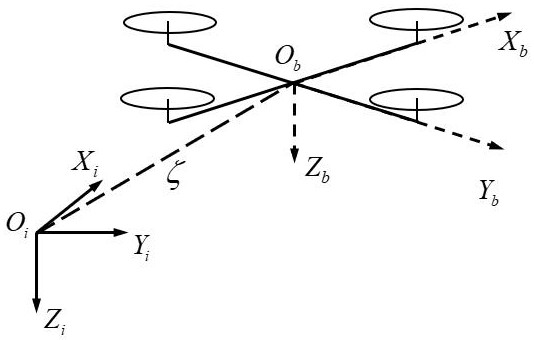
[0055] S101 establishes a corresponding dynamic model according to the space motion of the quadrotor UAV;
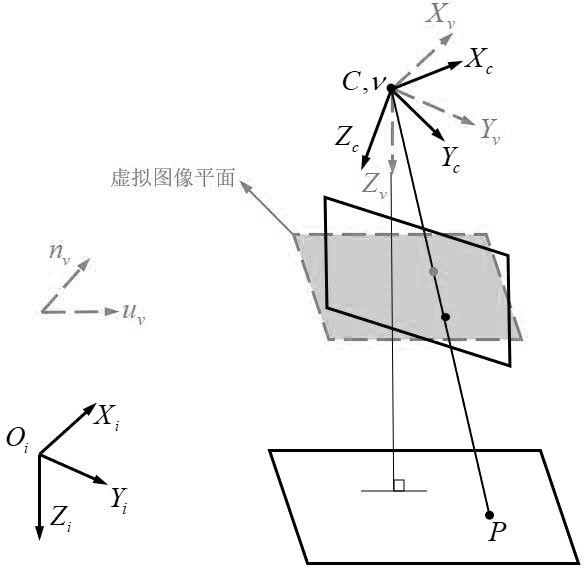
[0056] S102 Select image moment as the feature of visual servoing, and integrate the virtual feature plane to establish image feature dynamics...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More