

Bionic robot based on pneumatic muscles
A bionic robot and pneumatic muscle technology, applied in the field of robotics, to achieve the effect of compact structure, high power/mass ratio, and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
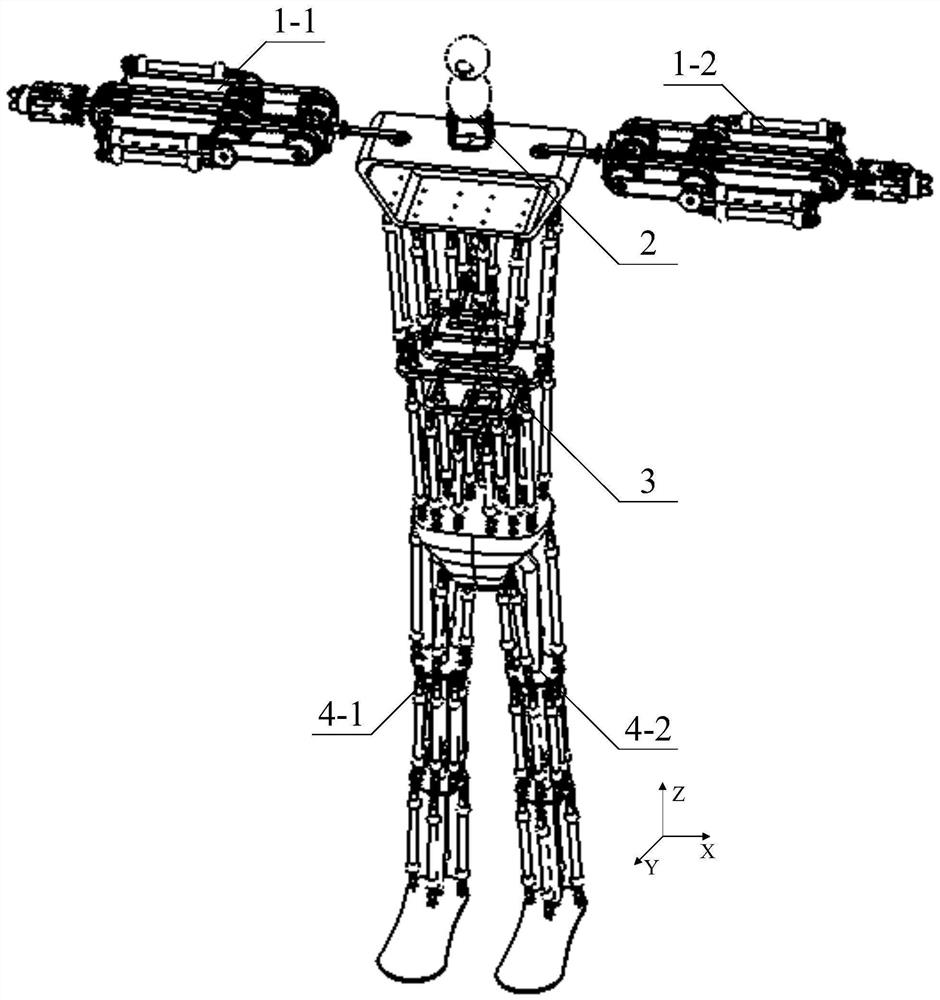
[0043] A bionic robot based on pneumatic muscles, comprising: a waist joint 3, a head joint 2 is arranged on the upper part of the waist joint 3, upper limb joint 1 and upper limb joint 2 1-2 are respectively arranged on both sides, and lower limb joint 1 is respectively arranged on the lower part 4-1 and lower limb joint 2 4-2, upper limb joint 1 and upper limb joint 2 1-2 have the same structure and are mirror images of each other, lower limb joint 1 4-1 and lower limb joint 2 4-2 have the same structure and are mutual mirror images ;
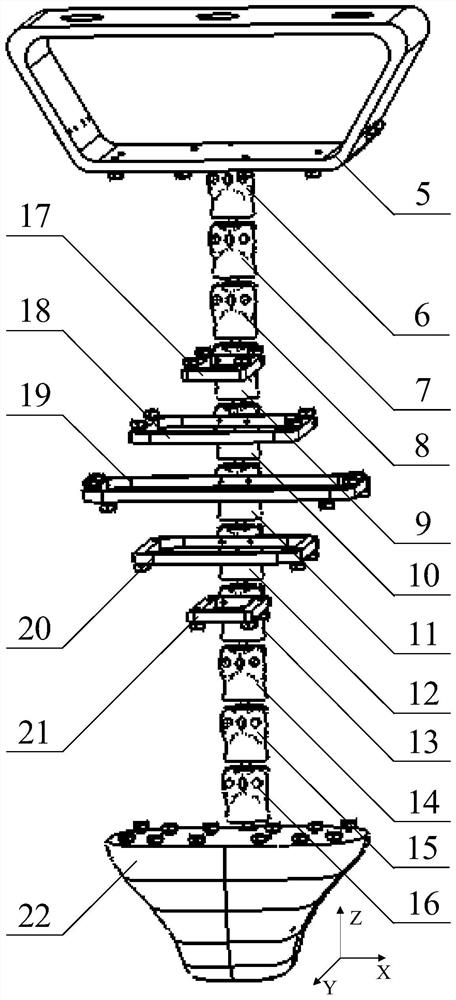
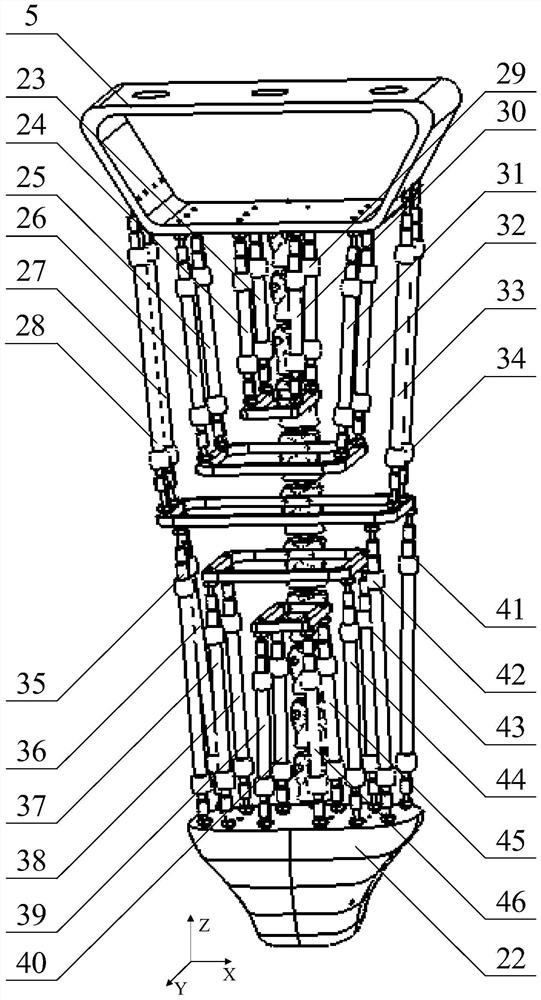
[0044] Sternum 5 of lumbar joint 3, vertebra 1 6, vertebra 2 7, vertebra 3 8, vertebra 4 9, vertebra 5 10, vertebra 6 11, vertebra 7 12, vertebra 8 13, vertebra 9 14, vertebra 10 15, vertebra 11 16. The pelvis 22 can be rotatably connected in sequence, the fourth vertebra 9 is fixedly connected to the first r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More