

Mechanical arm tail end trajectory tracking algorithm based on null space obstacle avoidance
A trajectory tracking and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large end-track tracking errors, and achieve good results, simple numerical calculation, and improved trajectory tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
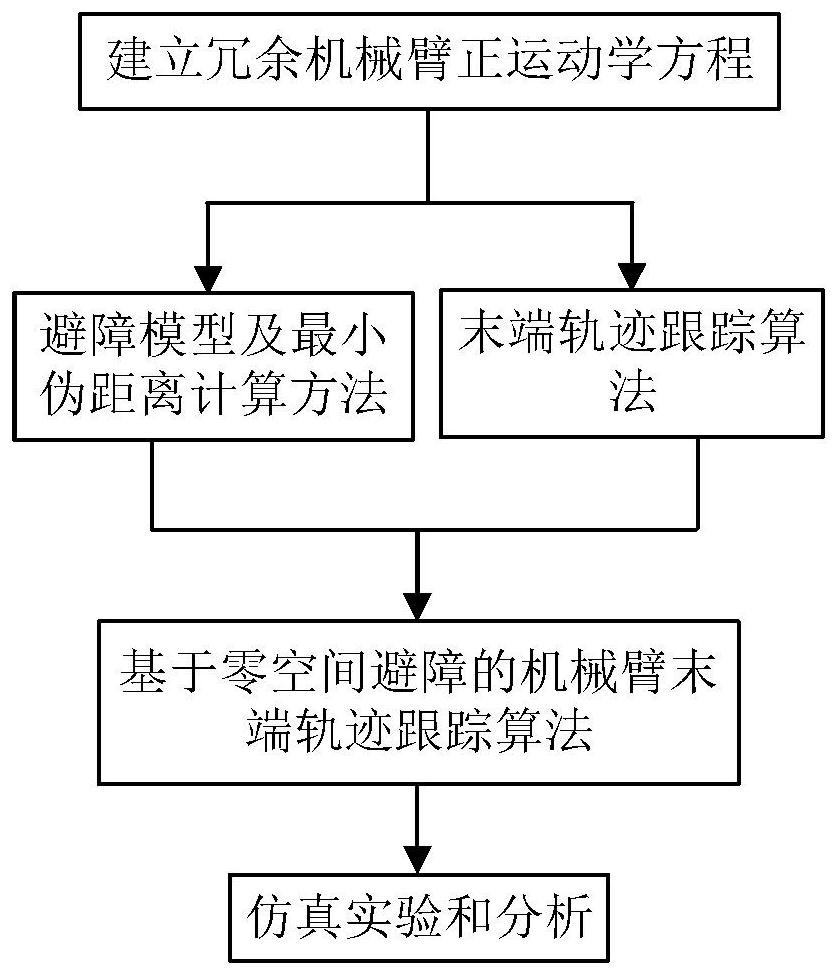
[0037] The implementation process of the whole invention is shown in figure 1 , the specific implementation details are as follows:
[0038] (1) Establish the positive kinematics equation of the redundant manipulator
[0039] The homogeneous transformation matrix of each link
[0040]
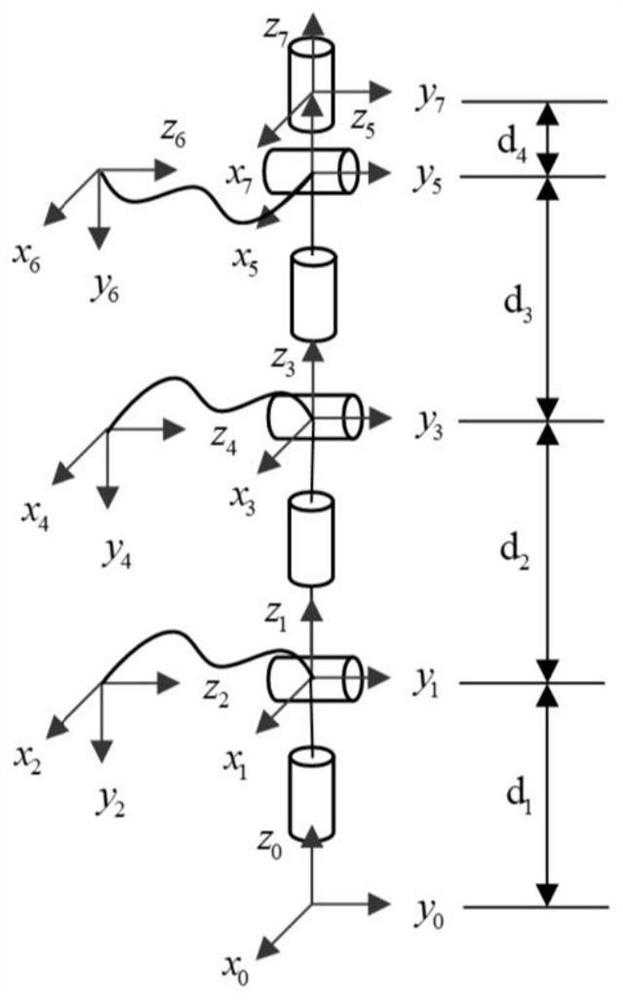
[0041] Among them, q i is the joint angle, ai-1 is the connecting rod length, α i-1 is the torsion angle, d i Offset for the connecting rod. figure 2 It is a 7-DOF manipulator kinematics model diagram.
[0042] The positive kinematic equation of the tool coordinate system at the end of the manipulator relative to the base coordinate system is described as
[0043]
[0044] Among them, q=[q 1 ,q 2 ,q 3 ,q 4 ,q 5 ,q 6 ,q 7 ] T is the joint angle vector, R Tool is the end pose matrix, p Tool is the end position vector. The homogeneous transformation matrix T(q 1 )T(q 2 ),…,T(q 7 ), so that the positive kinematics equation T(q) of the redundant manipulator can be obtained...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More