Patrol robot based on AprilTag visual localization
A patrol robot and visual positioning technology, applied in the field of patrol robots, can solve the problems that artificial landmarks are easily affected by the environment, lighting and other conditions, the cumbersome handover of documents and parts, and the high recognition error rate. The effect of multi-core processing, tracking accuracy and high recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
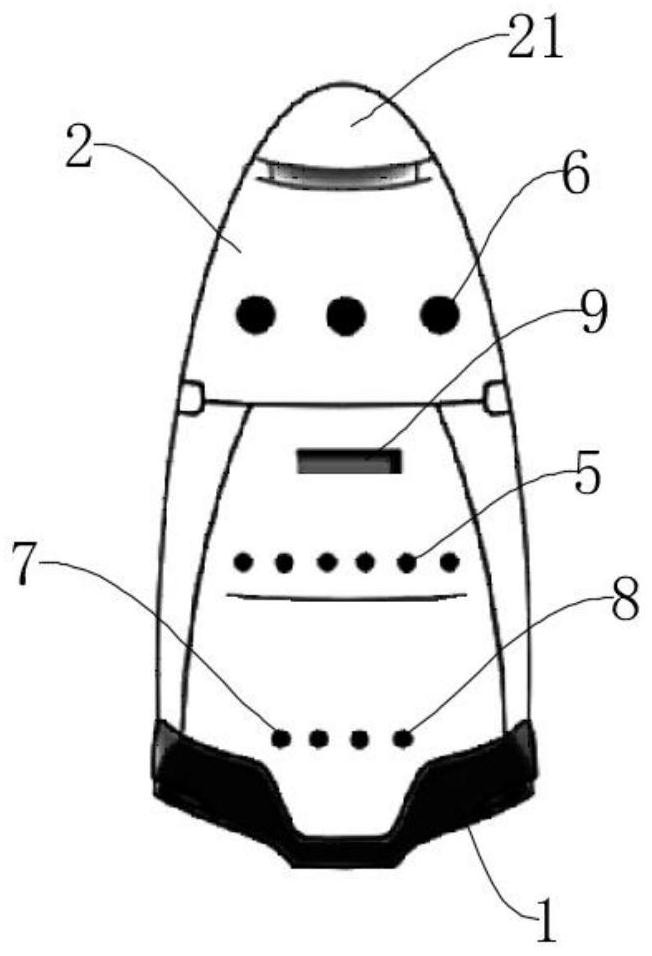
[0057] see Figure 1 to Figure 13 , the technical solution provided by the present invention is, a patrol robot based on AprilTag visual positioning, and the patrol robot of AprilTag visual positioning is used for patrol monitoring in office areas or public places;
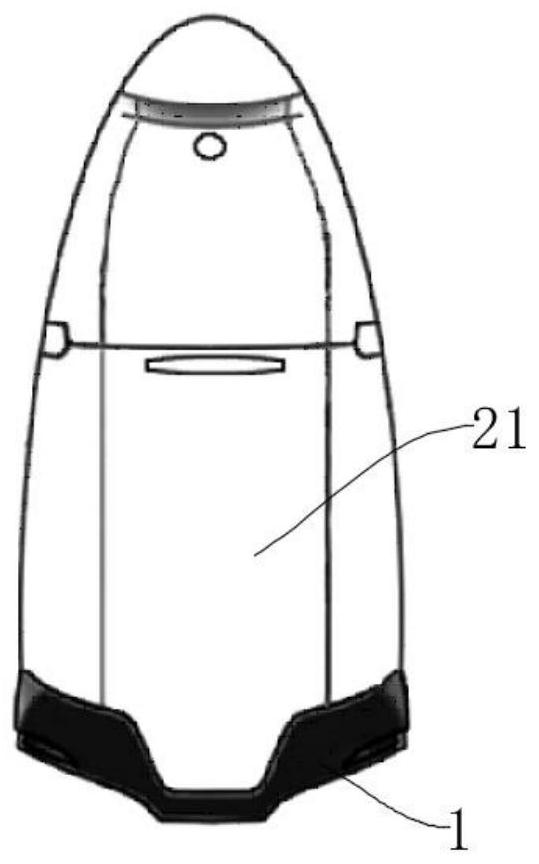
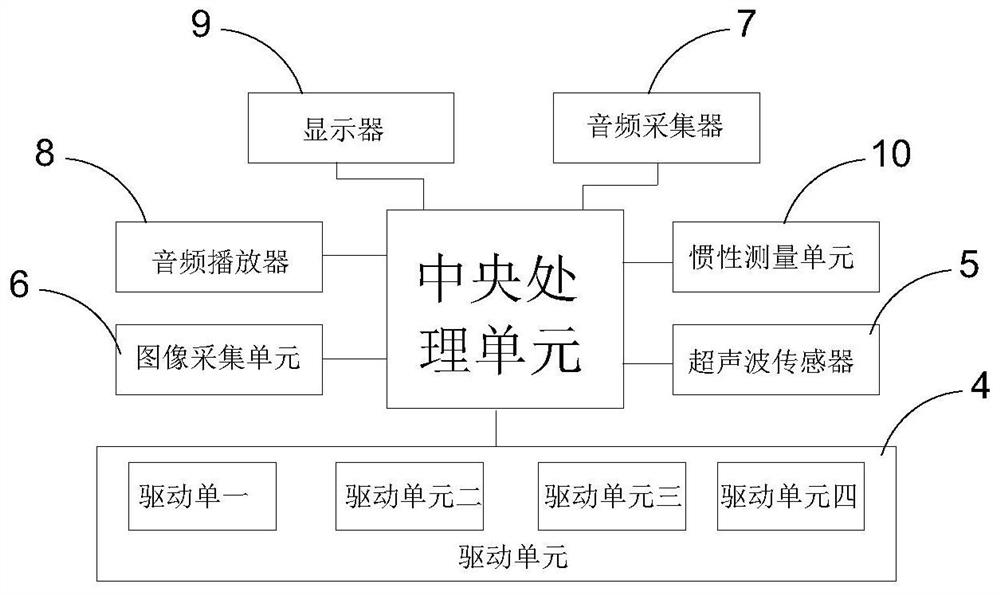
[0058] It includes a base 1, a housing 2, a central processing unit 3, a drive unit 4, an ultrasonic sensor 5, an image acquisition unit 6, an audio collector 7, an audio player 8, a display 9 and an inertial measurement unit 10;
[0059] The driving unit 4 is respectively arranged on the base 1, and the driving unit 4 is composed of a driving unit one, a driving unit two, a driving unit three and a driving unit four, and each driving unit 4 electric control end is connected with the electric wheel of the traveling wheel. The driving end is connected and drives the traveling wheels to rotate;
[0060] The housing 2 is arranged on the base 1, the ultrasonic sensor 5, the image acquisition unit 6, the audio collect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More