

Intelligent logistics path planning method and system
A route planning and intelligent logistics technology, applied in general control systems, control/regulation systems, program control, etc., can solve problems such as difficulty in jumping out, local optimization of algorithms, and inability to plan optimal routes, and achieve high real-time performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
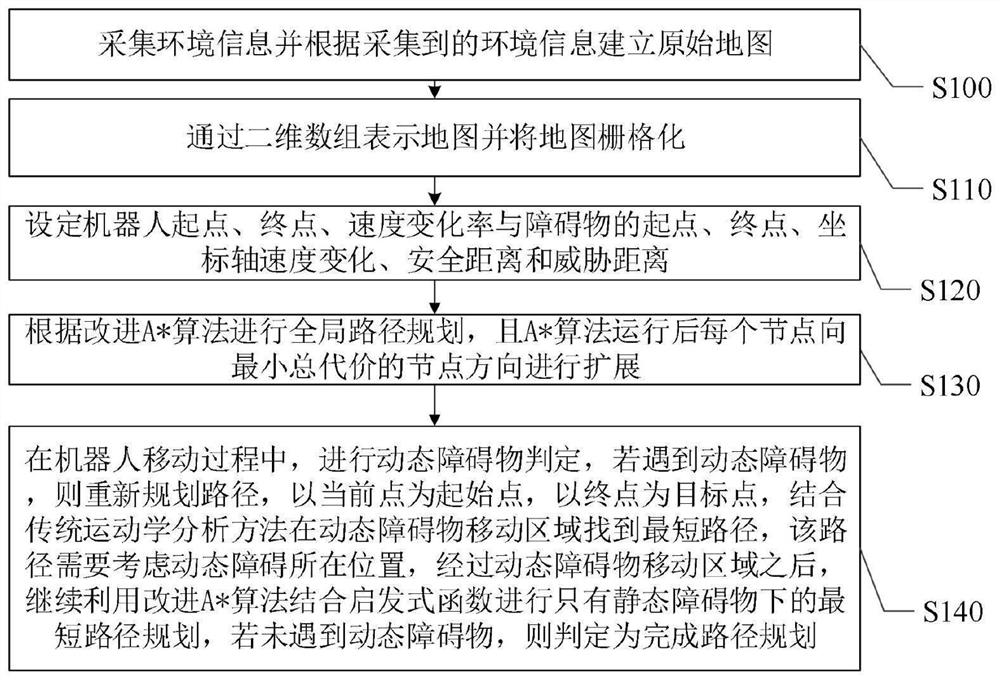
[0053] see figure 1 and figure 2 , figure 1 A schematic diagram of the steps of an intelligent logistics path planning method provided by an embodiment of the present invention is as follows:
[0054] Step S100, collecting environmental information and establishing an original map according to the collected environmental information; using the camera on the robot car to collect environmental information, and establishing an original map accordingly;
[0055] Step S110, map preprocessing, represent the map through a two-dimensional array and rasterize the map; represent the map with a two-dimensional array, and rasterize the map, the state of each grid is walkable (no obstacle) and Impossible to walk (with obstacles).
[0056] The logistics warehouse is divided into a square grid by the grid method, and the QR code is placed on the square node. Each node in the grid represents a grid; the area where the obstacle is located is shown in black in the grid map, Marked as 1 in ...
Embodiment 2
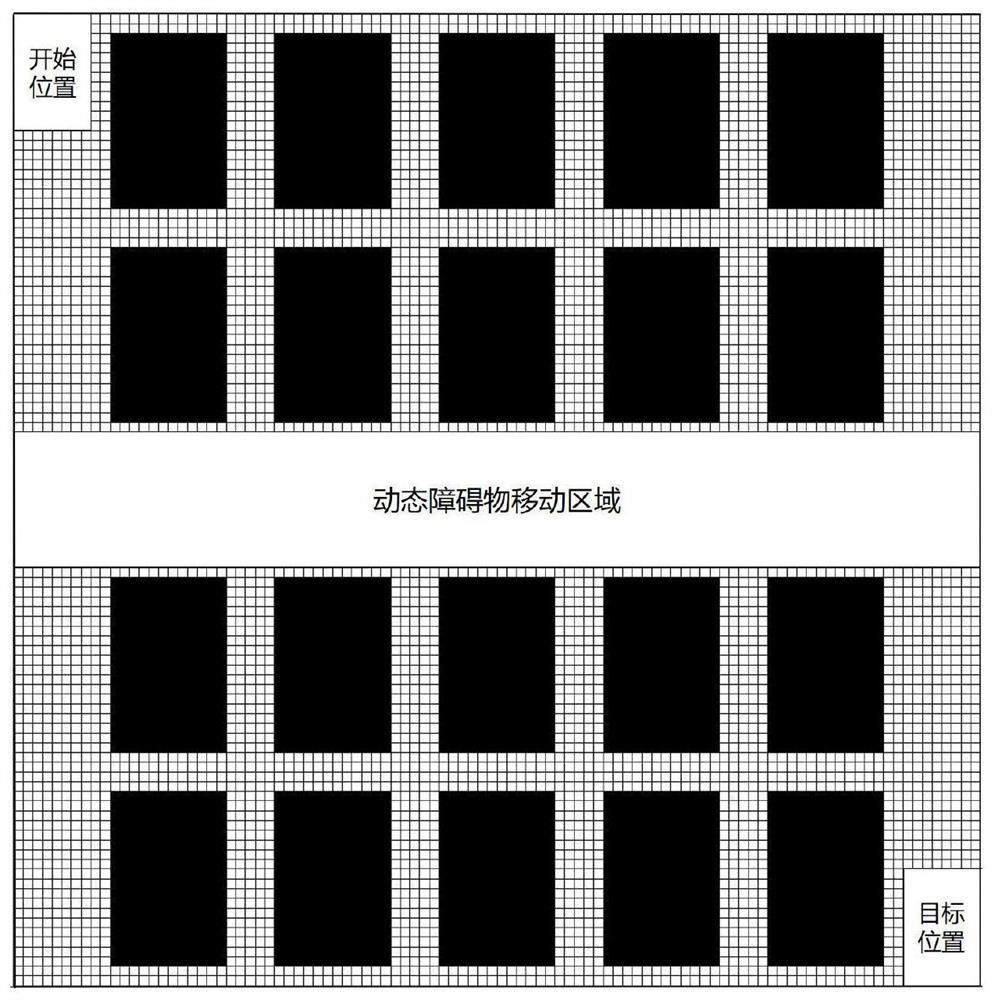
[0095] Based on the logistics path planning method described in Embodiment 1, if a dynamic obstacle is encountered during the movement of the trolley, a path planning algorithm with dynamic obstacles is performed. First, it is the same as the path planning with only static obstacles, and the grid map is specified. with dynamic obstacle sizes. In order to be closer to the actual environment of the logistics warehouse, 20 12×18 shelves were added to the grid map in step 2, and the shelves were divided into two groups. The distance between the squares is 16 squares; within the group, the distance between the two nearest squares of the two shelves with the same abscissa is four squares, and the distance between the two nearest squares between the two shelves with the same ordinate Five squares. Since the introduction of dynamic obstacles includes random static obstacles, no other static obstacles will be introduced except ten shelves. Then specify the size of the dynamic obstacl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More