

A mobile electro-hydraulic composite drive spraying robot with large working space
A spraying robot and electro-hydraulic composite technology, applied in the field of robots, can solve problems such as the limitation of the running space by the track, the interference of the spraying process, and the limitation of the working space, so as to improve the spraying accuracy and dynamic performance, improve the stability of the movement, and improve the stability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The specific implementation method of the present invention is given below, and described with reference to the accompanying drawings.
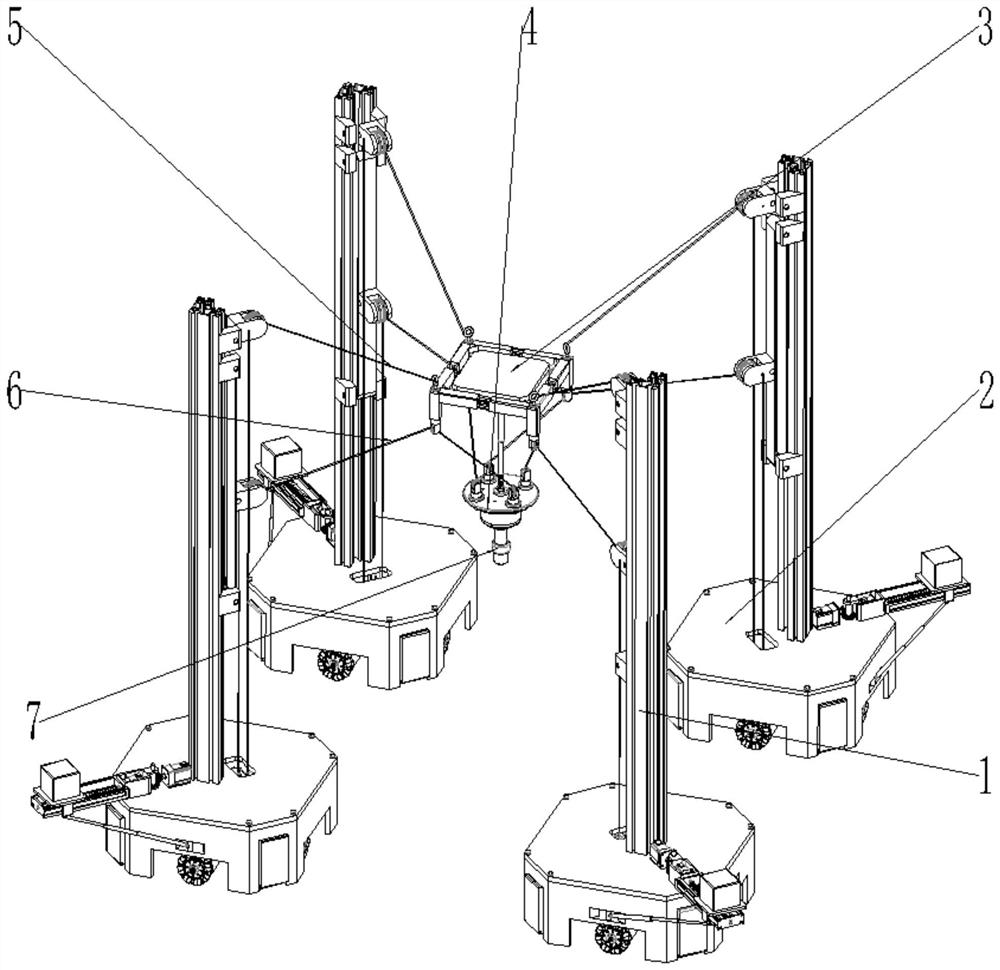
[0078] combine figure 1 , The spraying robot with large working space and movable electro-hydraulic composite drive consists of four identical drive rope position adjustment modules 1, four identical mobile bases 2, adjustable auxiliary motion platform 3, and rotary motion platform 4 , Four adjustable auxiliary motion platform drive ropes 5, four rotary motion platform drive ropes 6, and spray gun 7.
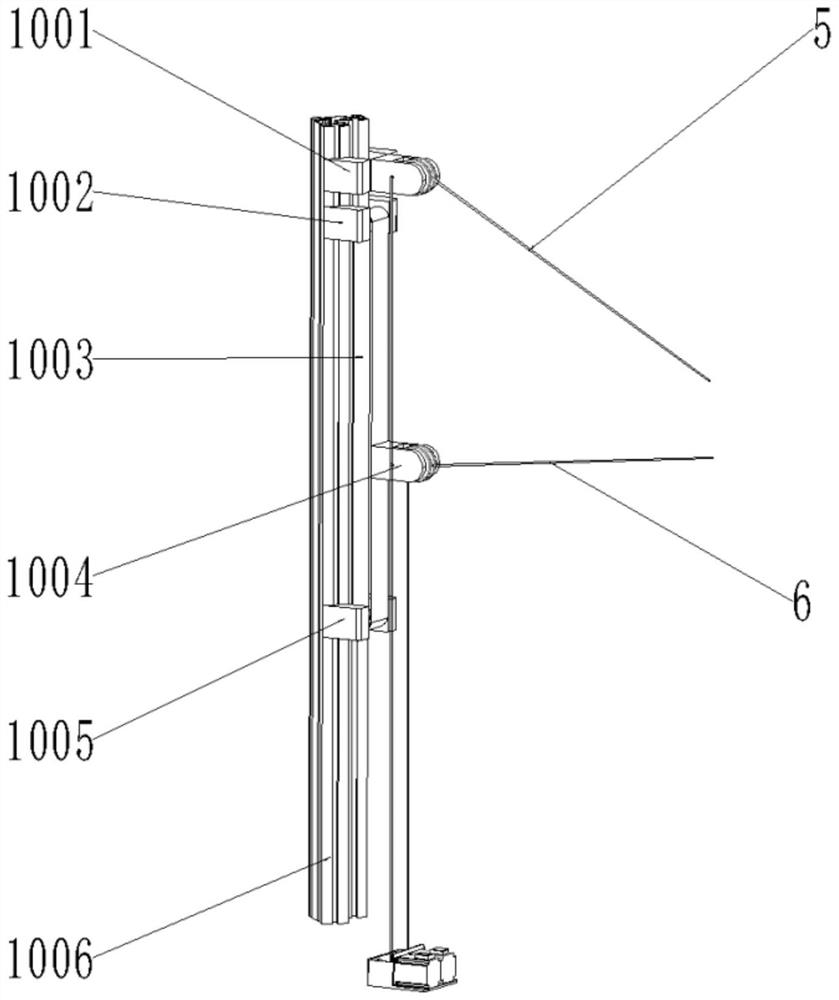
[0079] Further, the four mobile bases 2 are responsible for carrying other mechanisms, and the profile pillars 1006 in the corresponding four drive rope adjustment modules 1 are fixed to the mobile base 2 through the installation holes reserved on the mobile base 2 The adjustable auxiliary motion platform drive rope 5 is driven by a motor in the drive rope adjustment module 1, extends from the drive rope adjustment module 1 and is conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More