

Robot positioning method based on particle filtering
A robot positioning and particle filter technology, applied in the field of robotics, can solve the problems of single-line laser information not being so rich, not applicable, and the map does not save obstacle information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
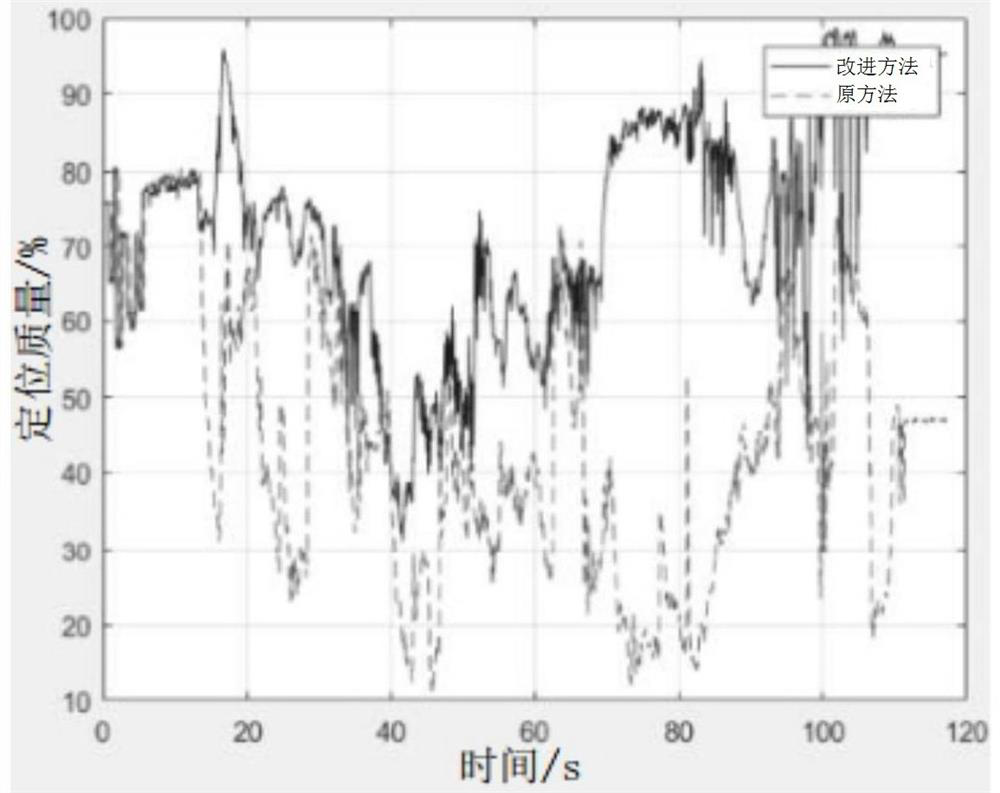
[0069] Experimental results and analysis
[0070] Experiment preparation: The platform used in this experiment consists of a self-made chassis with a differential wheel, a SCIK tim-561 single-line laser radar, a Xiaomi smart S1040 binocular camera, an ALUBI IMLPMS-ME1 model IMU and a The CPU is composed of i7-9750H Dell notebooks. The experimental site is a back-shaped indoor office site. In this site, three experiments on initial positioning, process positioning, and point positioning are carried out. In the initialization experiment, the robot's range of motion in the field was used to compare and test the average success rate and average positioning time of the initialization positioning of the two methods. The process positioning experiment is to let the robot move and compare the positioning quality of the two methods. The point-to-point positioning experiment is to measure the overall improvement effect from the system's final point-to-point positioning accuracy.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More