

PID control method based on stability coefficient multivariable strong coupling time-delay system
A technology of stability coefficient and time-delay system, applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as deterioration of paper appearance and physical properties, difficulty in implementing controllers, and influence on paper quantitative distribution uniformity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
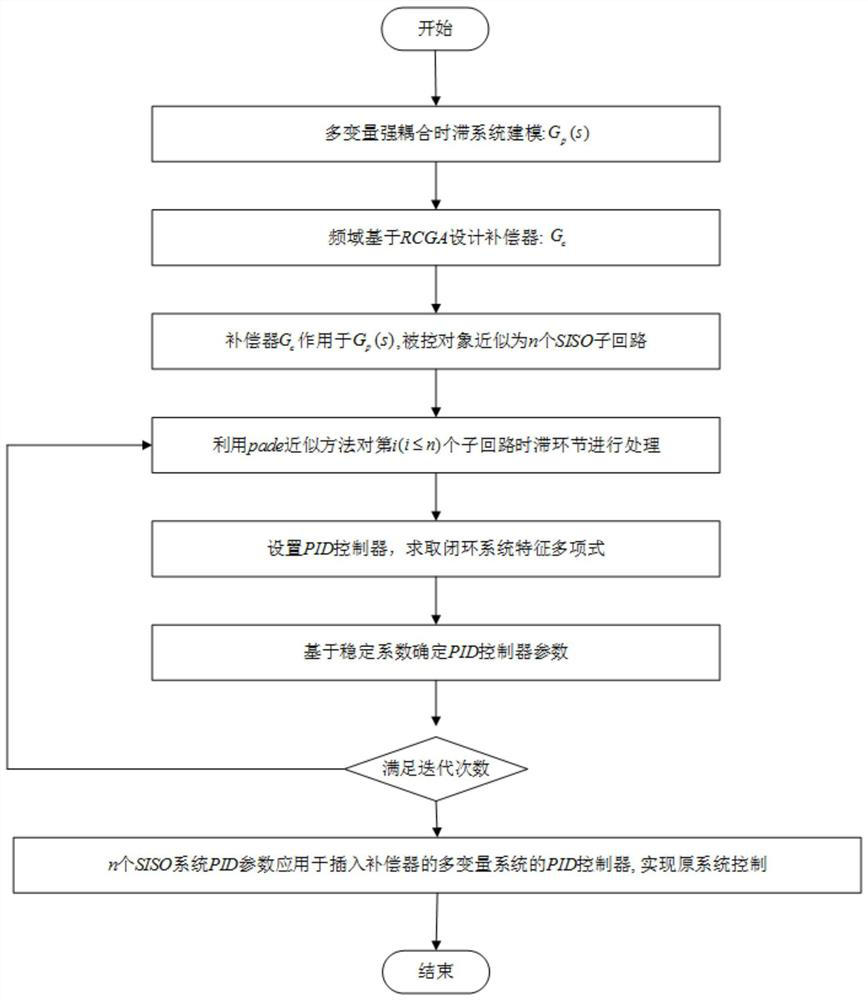
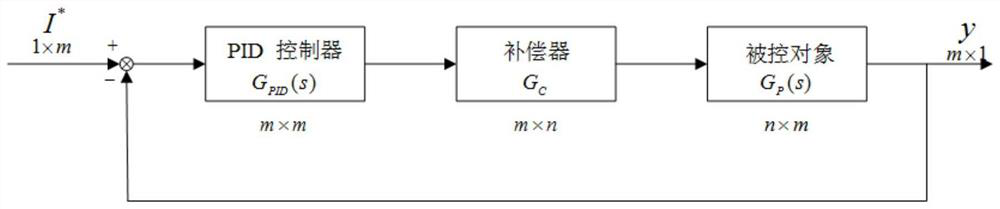
[0052] The present invention is described in detail below in conjunction with specific embodiments. The present invention provides a PID control method for multivariable strongly coupled time-delay systems based on stability coefficients, which is a brand-new control design method for multivariable strongly coupled time-delay systems that is relatively easy to implement. First, aiming at the strong coupling effect of multiple variables, a real-coded genetic algorithm (Real-Coded Genetic Algorithm, RGGA for short) is used to design a compensator to realize system decoupling. Secondly, for the time-delay effect of the system, the improved Pade approximation method is used to deal with the time-delay link. Then, the PID controller parameters are determined for each sub-loop of the decoupled system based on the stability coefficient. Finally, each subloop PID parameter is applied to the PID controller of the original multivariable system with compensators inserted. The method of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More