

Incomplete point cloud completion method based on hidden space topological structure constraint
A topology and latent space technology, applied in the field of computer vision, can solve the problems of difficulty in perception, understanding and action planning of 3D models, inability to describe and represent complete geometric shapes, and incomplete 3D information. The effect of strong generalization and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] In order to clearly illustrate the technical characteristics of this patent, the following describes this patent in detail through specific implementation methods and in conjunction with the accompanying drawings.
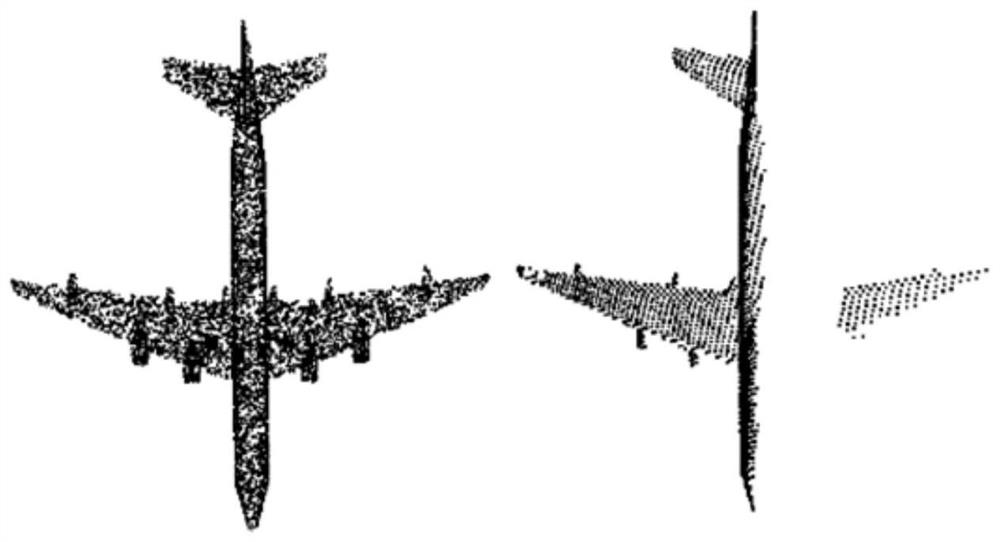
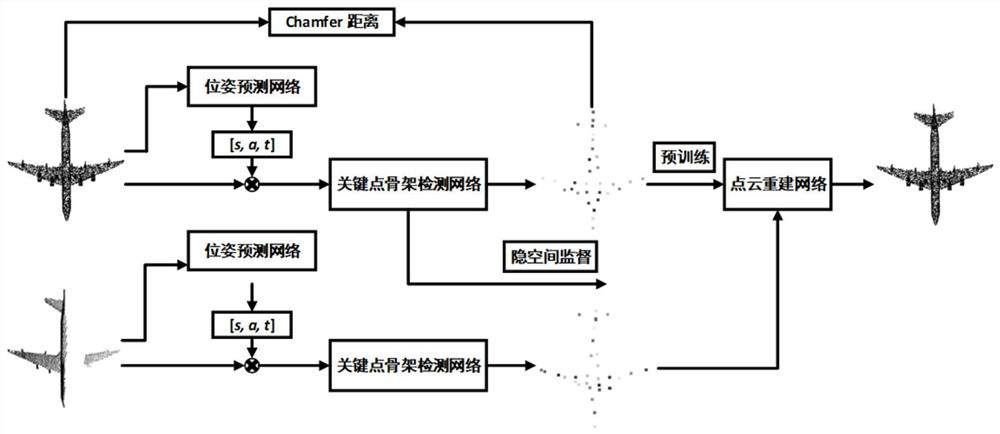
[0043] The present invention will firstly standardize the attitude of the input original incomplete 3D point cloud based on the cascaded deep neural network and massive artificially constructed 3D point cloud data sets, and then predict its corresponding potential sparse key points according to the normalized residual point cloud Skeleton, and finally based on the sparse key point skeleton through upsampling and recovery to obtain a complete dense 3D point cloud.
[0044] The three-dimensional point cloud data has high complexity, and has the characteristics of disordered arrangement and rotation invariance. It is difficult to complete the objects with unknown structures well by the completion method based on geometric relationship optimization. Therefore, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More