

Path planning method and cleaning robot
A path planning and cleaning technology, applied in instruments, vehicle position/route/height control, non-electric variable control, etc., can solve the problems of unscientific cleaning path, reduced cleaning efficiency, low cleaning path efficiency, etc., to reduce repeated cleaning The probability of the same area and the probability of missed cleaning area, the effect of improving efficiency, improving cleaning efficiency and cleaning coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
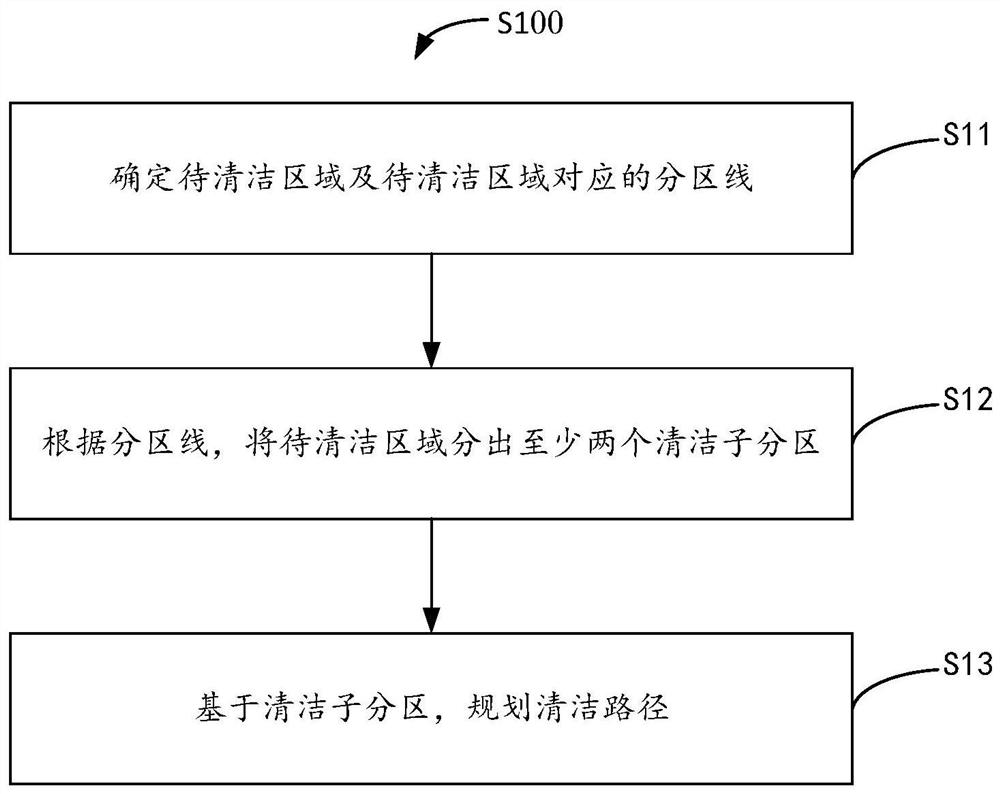
[0020] figure 1 A flow schematic diagram showing a path planning method according to an embodiment of the present invention is detailed, and the path planning method S100 includes:
[0021] S11, determine the partition line corresponding to the area to be cleaned and the area to be cleaned.
[0022] As an example, it is not limited that the area to be cleaned is used to indicate a region where the robot is cleaned, wherein the area to be cleaned may be a regular shape or irregular shape, for example, the shape of the area to be cleaned includes any of the following: rectangular, Square, trapezoidal, diamond, or, the shape of the to be cleaned is a combined shape corresponding to the above shape.
[0023] As an example, it is not limited, and the area to be cleaned can be divided by the user or cleaning robot in the map, wherein the map can be obtained by the cleaning robot in real time, and can be built in advance by the user, and the cleaning robot needs to use the map planning ...
Embodiment 2
[0139] See Image 6 , Image 6 A schematic diagram of a cleaning robot according to an embodiment of the present invention, wherein the cleaning robot of the embodiment of the present invention can be configured to achieve a particular service function operation, for example, in some embodiments, the cleaning robot includes Not limited to sweeping robots, vacuuming robots, mop robots, and washing robots, etc. like Image 6 As shown, the cleaning robot 600 includes one or more processors 61 and a memory 62. in, Image 6 Taking a processor 61 as an example. Processor 61 and memory 62 can be connected by bus or other means, Image 6 In connection with the bus connection.
[0140] The memory 62 is used as a non-volatile computer readable storage medium, which can be used to store non-volatile software programs, non-volatile computer executable programs, and modules, such as program instructions corresponding to path planning methods in the embodiment of the present invention. / Module. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More