

Effective map merging method based on context description conforming to corresponding extension
A context and map technology, applied in image data processing, graphic image conversion, character and pattern recognition, etc., to achieve good efficiency and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
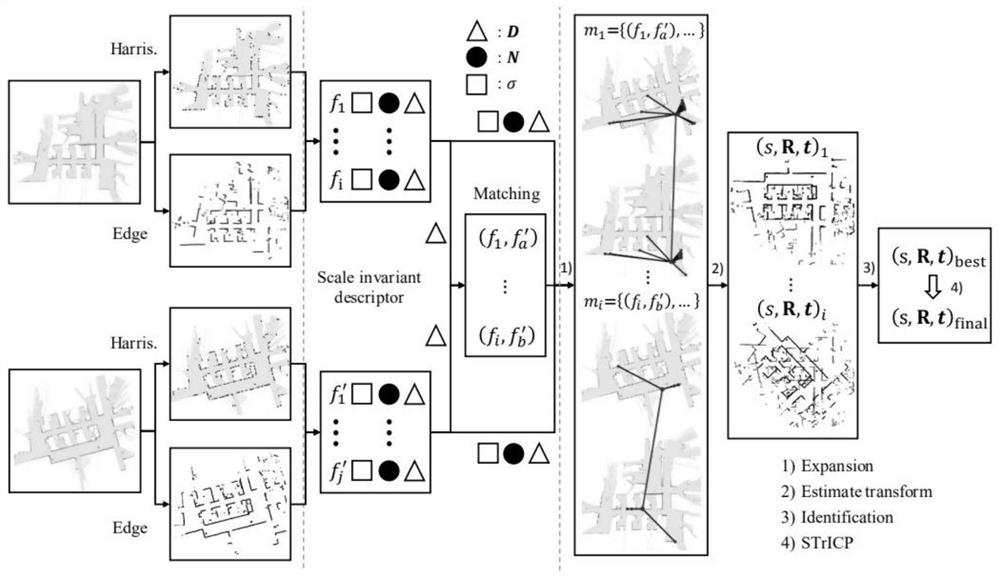
[0070] Such as Figure 1-10 As shown, the embodiment of the present invention provides a context-based description and an effective map merging method that conforms to the corresponding extension is divided into four parts,
[0071] The steps included in each section are as follows:
[0072] 1) Interest points are detected for each raster map by the Harris corner detector.
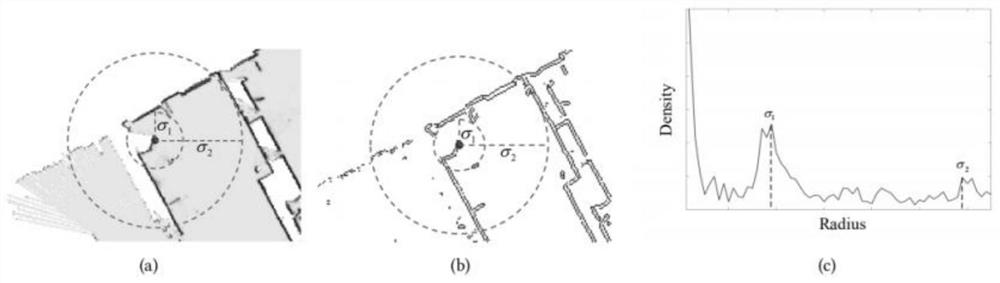
[0073] 2) Compute context-based descriptors (σ, N, D) of interest point f and build raw matching pairs. where (σ, N, D) denote the scale radius, eigenvalue-based vector and eigenvector-based matrix, respectively.
[0074] 3) A scale-proportion based matching pair expansion is designed to expand each original matching pair (f, f') into a feature matching set for estimating an affine transformation.
[0075] 4) Define the measurement function to confirm the optimal similarity transformation, which is refined by the STrICP algorithm to achieve accurate raster map merging.
[0076] figure 2 is an illustr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More