Human body curved surface modeling method, modeling device and modeling system
A technology of surface modeling and modeling method, applied in control/adjustment system, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve problems such as inability to stabilize modeling operations, and achieve human body surface The modeling process is stable, the human body model is good, and the quality is good
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
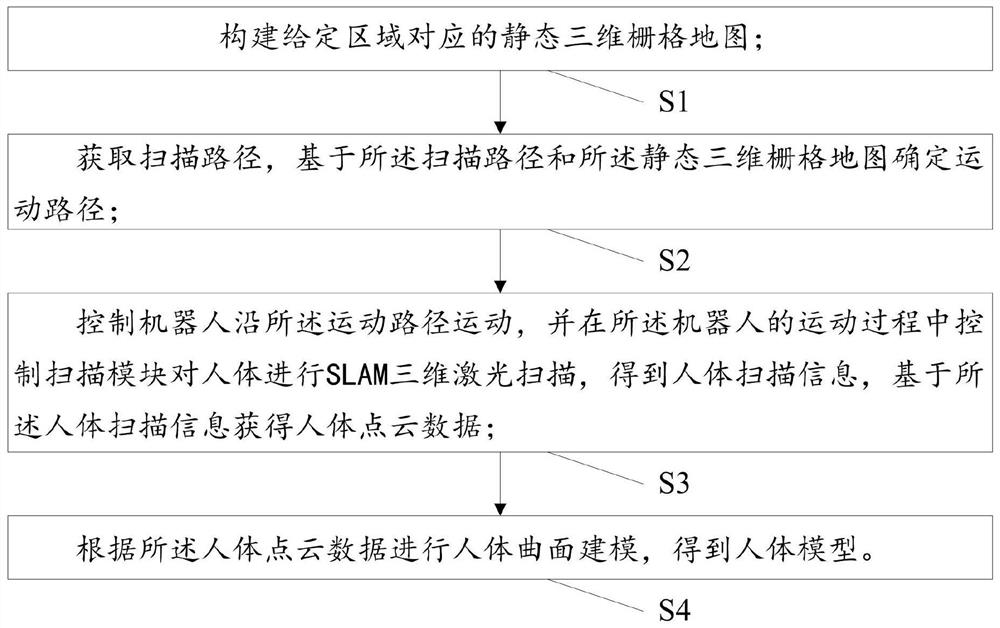
[0036] This embodiment is used to provide a human body surface modeling method, such as figure 1 As shown, control such as image 3 The modeling device works, and the modeling method includes:
[0037] S1: Construct a static three-dimensional grid map corresponding to a given area; the given area includes a human body bathing area;
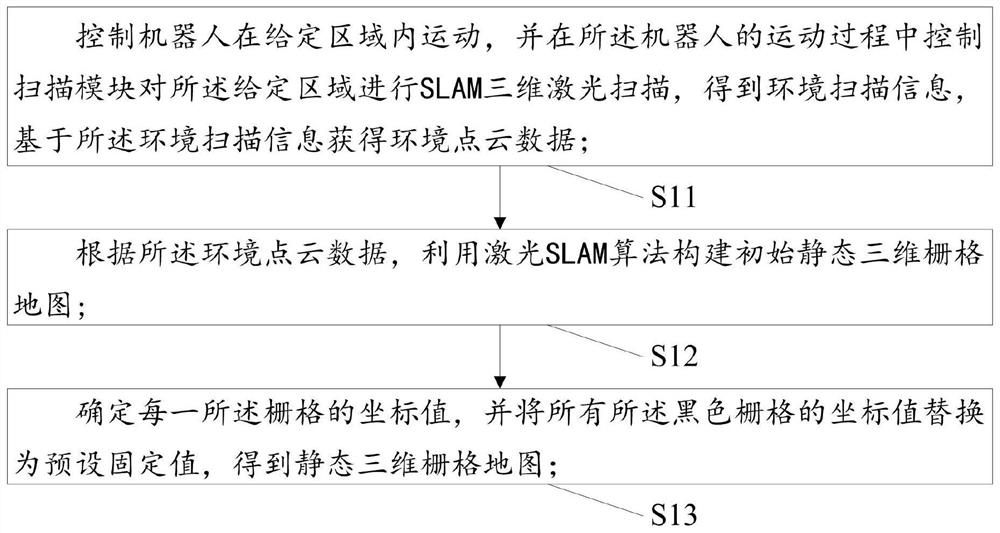
[0038] The purpose of S1 is to obtain the position information of static obstacles in a given area, and to eliminate the influence of static obstacles on the movement of the robot during the subsequent planning of the robot's motion path, so that the robot will not be hindered by static obstacles. Specifically, such as figure 2 As shown, S1 can include:
[0039] S11: Control the robot to move in a given area, and control the scanning module to perform SLAM three-dimensional laser scanning on the given area during the movement of the robot to obtain environmental scanning information, and obtain an environmental point cloud based on the environ...
Embodiment 2
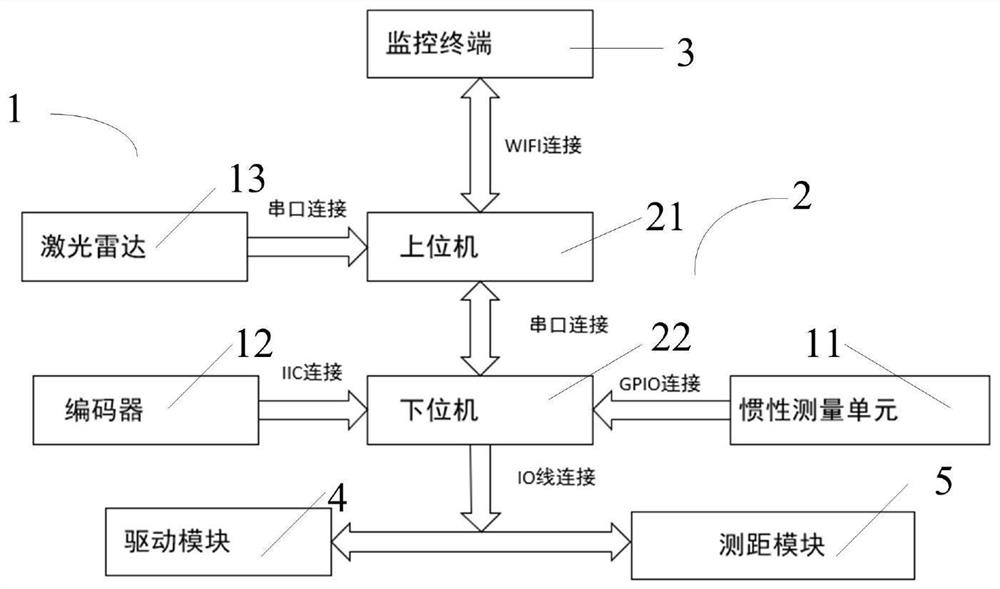
[0082] This embodiment is used to provide a human body surface modeling device, such as image 3 As shown, the modeling method as described in Embodiment 1 is used to work, and the modeling device includes a robot, a scanning module 1 , a control module 2 and a monitoring terminal 3 .
[0083] The scanning module 1 is arranged on the robot, and both the scanning module 1 and the robot are in communication connection with the control module 2 , and the control module 2 is in communication connection with the monitoring terminal 3 .
[0084] The monitoring terminal 3 is used to determine the scanning path according to the pose of the human body, and transmit the scanning path to the control module 2 . The control module 2 is used to construct a static three-dimensional grid map corresponding to a given area, determine a motion path according to the scanning path and the static three-dimensional grid map, and control the robot to move along the motion path. The given area includ...
Embodiment 3
[0100] This embodiment is used to provide a human body surface modeling system, such as Figure 4 As shown, utilize the modeling method as described in embodiment 1 to work, and described modeling system comprises:
[0101] The construction unit M1 is used to construct a static three-dimensional grid map corresponding to a given area; the given area includes a human body bathing area;
[0102] A determining unit M2, configured to obtain a scanning path, and determine a motion path based on the scanning path and the static three-dimensional grid map;
[0103] The acquisition unit M3 is used to control the robot to move along the motion path, and control the scanning module to perform SLAM three-dimensional laser scanning on the human body during the motion of the robot to obtain human body scanning information, and obtain human body point clouds based on the human body scanning information data;
[0104] The modeling unit M4 is configured to perform human body surface modelin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com