

Brain-like relative navigation method based on social location cells/grid cells
A technology of grid cells and relative navigation, applied to biological neural network models, complex mathematical operations, instruments, etc., can solve problems such as poor robustness and inaccurate calculations, and achieve improved robustness, strong universality, and The effect of learnability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
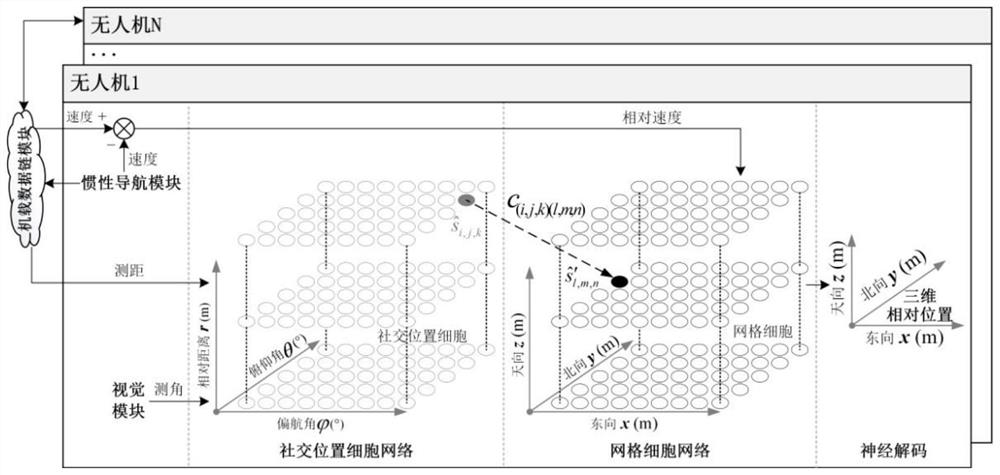
[0075] The vision processing module receives the images collected by the drone's visual sensor in real time, and calculates the linear velocity and heading angle of the drone in the forward and height directions according to the pixel value changes of two adjacent frames of images.
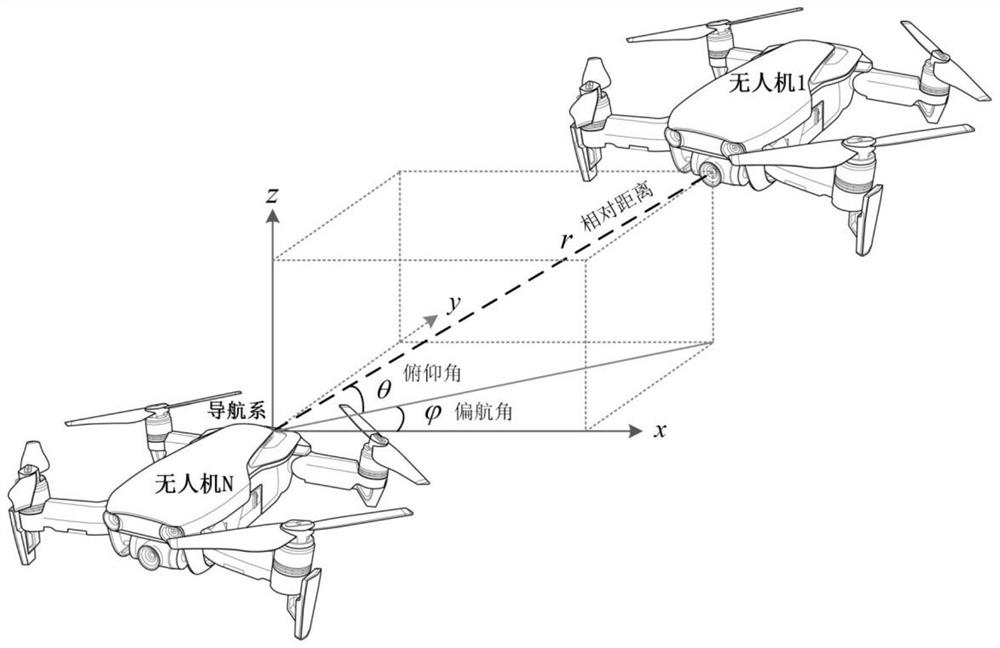
[0076] 1. Obtain UAV relative navigation sensor information
[0077] Load inertial navigation module, vision module, and airborne data link module for each UAV in the cluster, such as figure 2 As shown, the visual module outputs the relative pitch angle and relative yaw angle of the UAV relative to another UAV; the inertial navigation module outputs the three-dimensional velocity of the UAV in the geographic coordinate system; the airborne data link The module receives the three-dimensional velocity of another UAV in the geographic coordinate system output from the inertial navigation module of another UAV, and the relative distance between the UAV and the other UAV.
[0078] 2. Construct a 3D m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More