

A long-fin undulating propulsion bionic underwater robot
Patent Information
- Authority / Receiving Office
- CN · China
- Patent Type
- Patents(China)
- Current Assignee / Owner
- BEIHANG UNIV
- Publication Date
- 2022-04-15
Smart Images
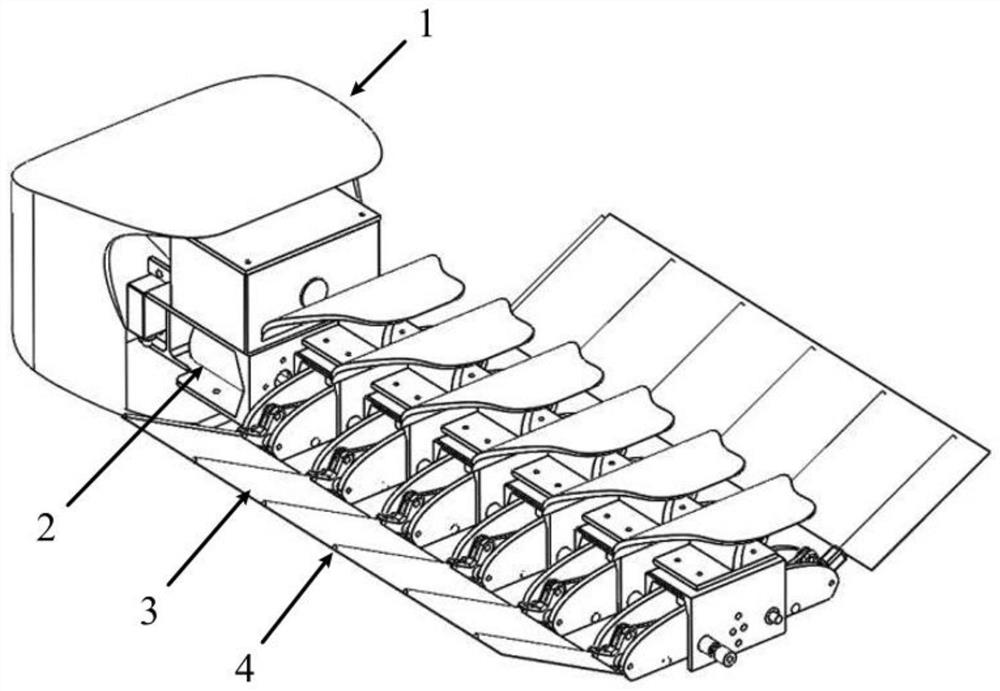
Figure 1 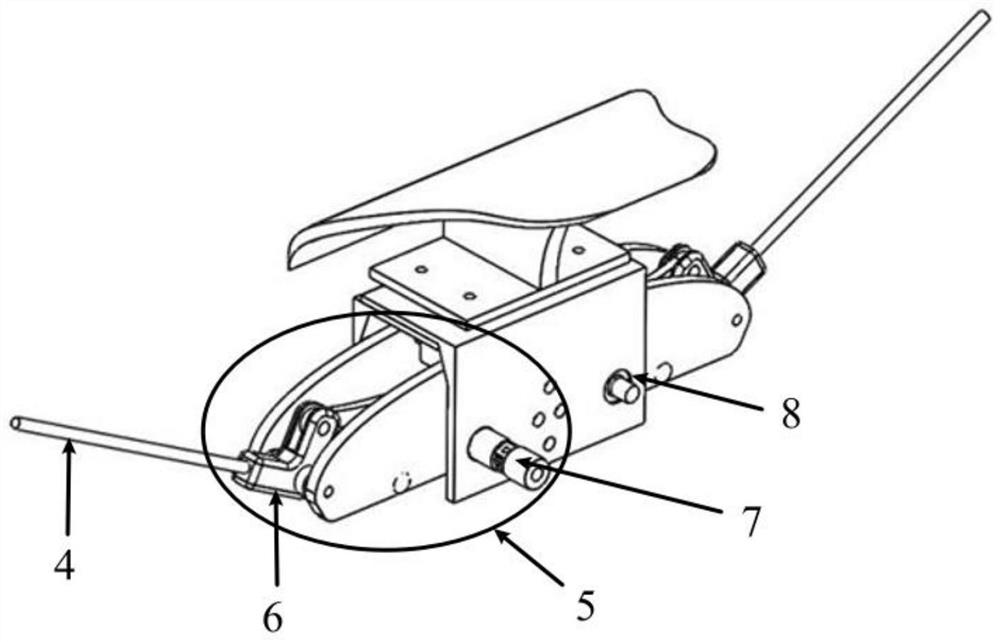
Figure 2 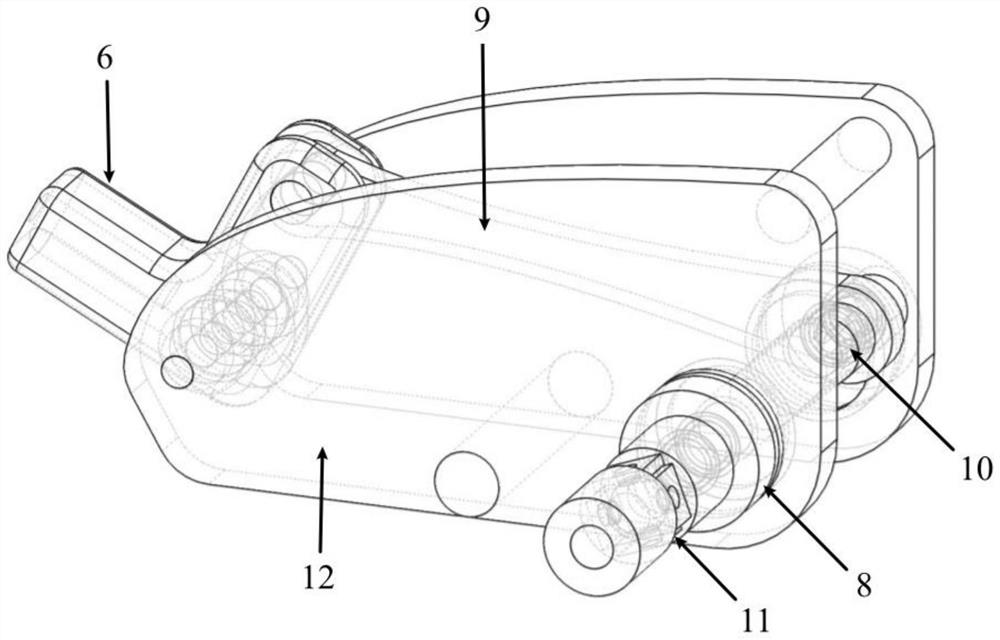
Figure 3
Abstract
Description
technical field
[0001] The invention relates to the technical field of robots, in particular to a long fin undulating propulsion bionic underwater robot. Background technique
[0002] Long fin propulsion, as a relatively common way of marine life movement, has better anti-interference and higher propulsion efficiency than body wave propulsion and propeller propulsion. Problems such as difficulty in changing have not been widely used in the field of bionic underwater robots. Contents of the invention
[0003] The purpose of the present invention is to provide a long-fin undulating propulsion bionic underwater robot to solve the above-mentioned problems in the prior art, realize high-frequency continuous fluctuation of the fin surface through a series four-bar linkage mechanism, and make full use of the foldable fin surface Adjusting the attitude of the body has the characteristics of high propulsion efficiency, good maneuverability, controllability and anti-interference. I...