

Series-parallel pelvic fracture reduction robot
A technology for pelvic fractures and robots, which is applied in the field of medical robots, can solve the problems that it is difficult to meet the requirements of compact structure of terminal surgical instruments, and it is difficult to achieve the load capacity of serial robots, and achieve the effects of convenient preoperative disinfection, large carrying capacity, and easy connection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
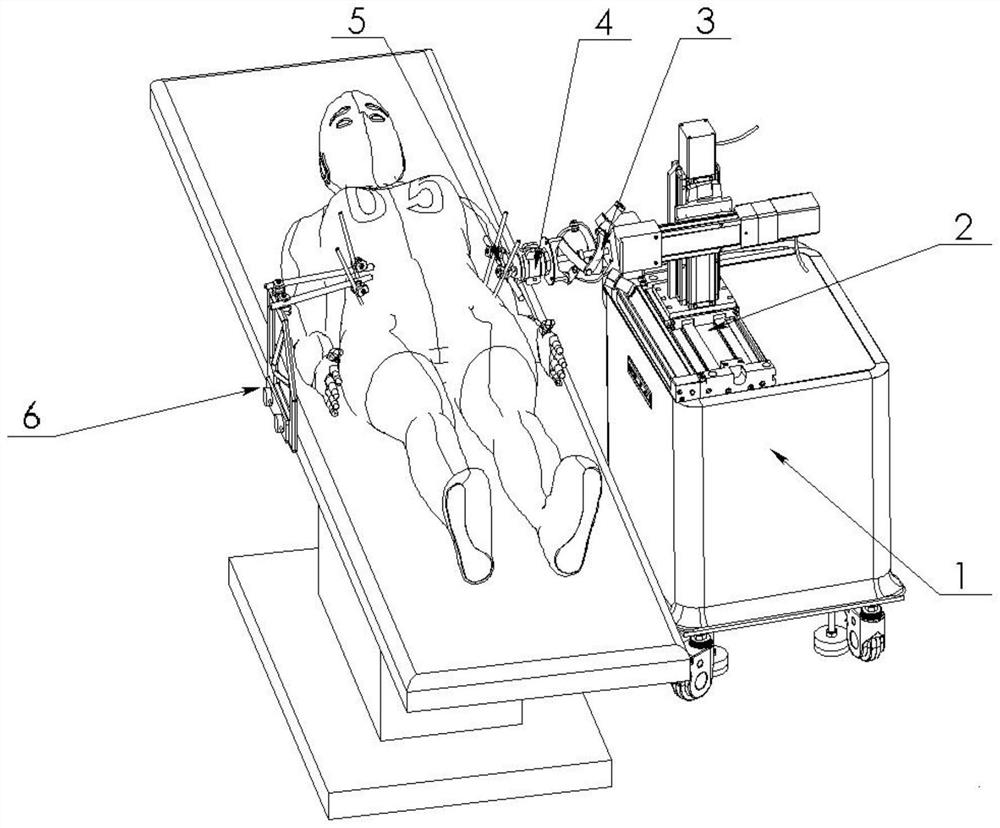
[0031] In this example, see figure 1 , figure 2 and Figure 6 , a series-parallel hybrid pelvic fracture reduction robot, including a box body 1, a three-dimensional guide rail 2, a 3-RRR spherical parallel mechanism 3, a docking mechanism 4 and an affected pelvic clamping device 5, and the box body 1 is fixed with Universal wheels 11 and fixed foot cups 12 are used to move and fix the robot respectively; the three-dimensional guide rail 2 is installed on the box body 1 to reset the three-degree-of-freedom translation reset of the robot, and a 3-RRR spherical parallel mechanism is fixed on it 3. The 3-RRR spherical parallel mechanism 3 is used to reset the three-degree-of-freedom rotation of the robot; the spherical parallel mechanism actuation platform is fixed with a docking mechanism, which is convenient for connecting with the pelvic clamping device 5 on the affected side through the docking mechanism 4, and is also convenient for surgery. Pre-disinfection; bone needle ...
Embodiment 2
[0034] This embodiment is basically the same as Embodiment 1, especially in that:
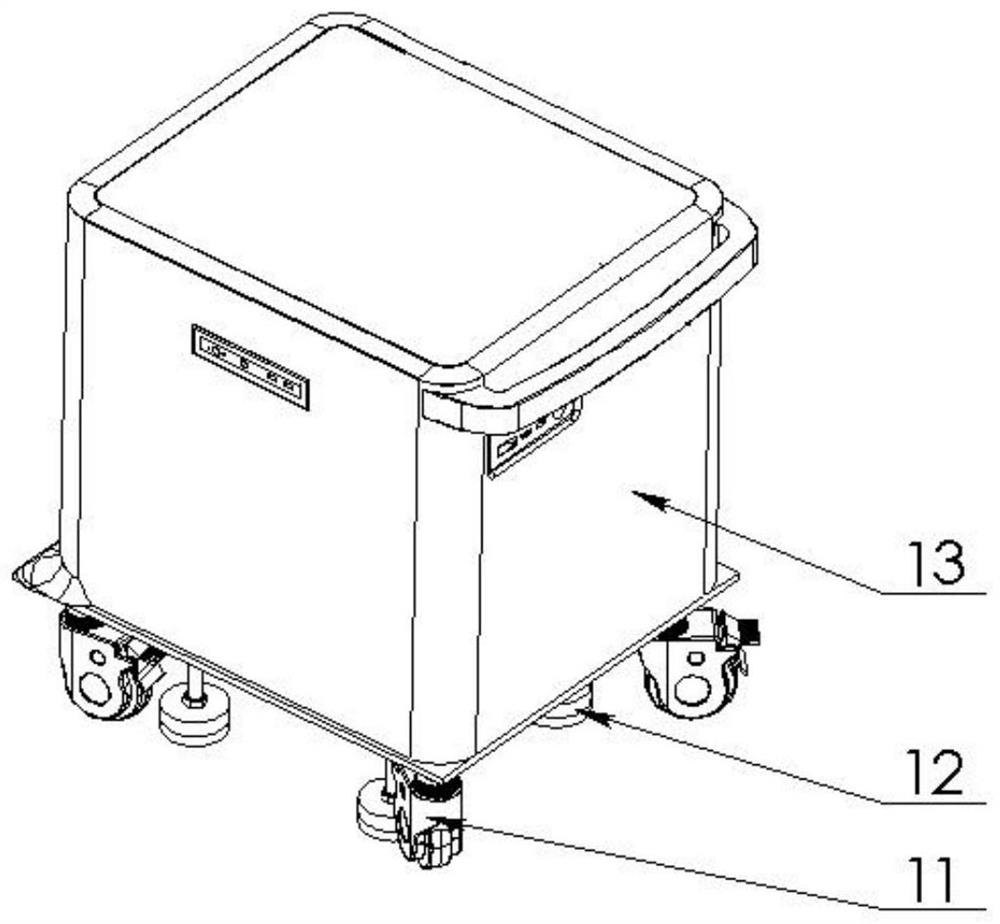
[0035] In this example, see figure 2 , the box body 1 includes four universal brake wheels 11, four fixed foot cups 12 and a chassis 13, the universal brake wheels 11 are installed under the chassis, and can be moved to a suitable position, and the fixed foot cups 12 are installed on the chassis 1 below is used to fix the chassis 13, and the box body 1 is used to place the controller and wires of the reset robot.
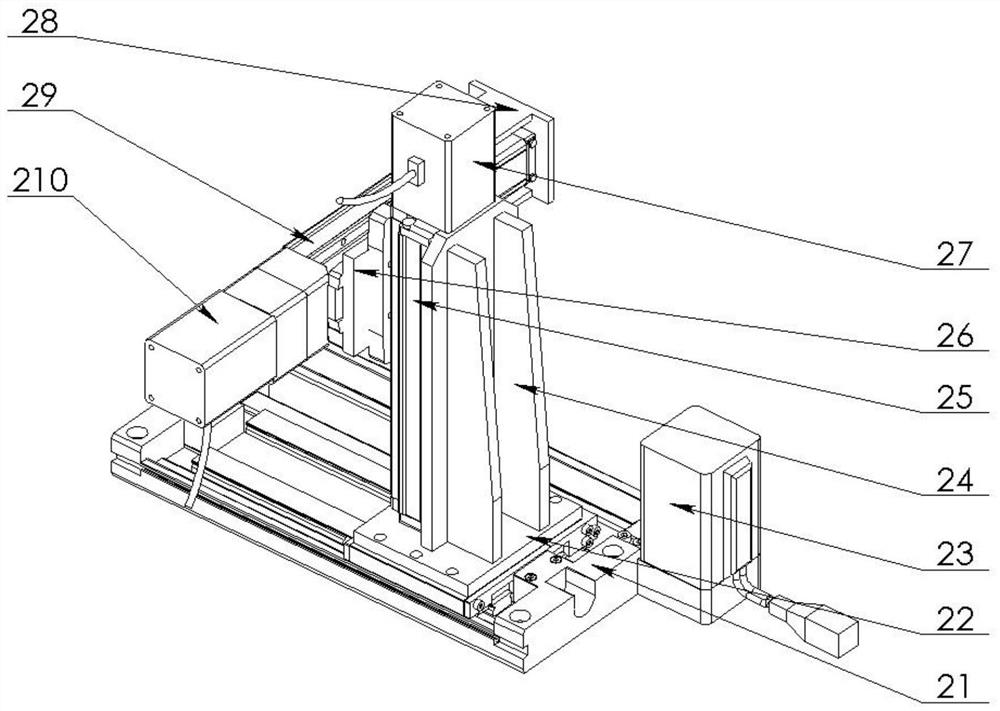
[0036] In this example, see image 3 , the three-dimensional guide rail 2 includes a longitudinal ball screw slider guide rail 21, a first connecting plate 22, a first stepping motor 23, a reinforcement plate 24, a column type vertical ball screw slider guide rail 25, and a second connecting plate 26 , the second stepping motor 27, the third connecting plate 28, the horizontal ball screw slider guide rail 29 and the third stepping motor 210, the longitudinal ball screw slider guid...
Embodiment 3
[0044] This embodiment is basically the same as the previous embodiment, and the special features are:
[0045] A serial-parallel hybrid pelvic fracture reduction robot, which consists of a box body 1, a three-dimensional guide rail 2, a 3-RRR spherical parallel mechanism 3, a docking mechanism 4, a pelvic clamping device 5 on the affected side, a pelvic clamping device 6 on the healthy side, and bone Needle holders 53, 54, 64, 66, 68, 69; said box 1 has universal wheels 11 and fixed foot cups 12, which are respectively used for moving and fixing robots; said three-dimensional guide rail 2 is used for 3 The degree of freedom is translated and reset, and a 3-RRR spherical parallel mechanism 3 is fixed on it. The 3-RRR spherical parallel mechanism 3 is used for 3 degrees of freedom to rotate and reset; The system is quickly connected to the pelvic clamping device 5 on the affected side, which is also convenient for preoperative disinfection; the pelvic clamping device 5 is provi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More