

Robot task point positioning method and device
A robot and task point technology, which is used in measurement devices, two-dimensional position/channel control, vehicle position/route/altitude control, etc., and can solve problems such as decreased positioning accuracy, poor positioning accuracy, and cumulative error of measured value calculation values.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Hereinafter, exemplary embodiments according to the present application will be described in detail with reference to the accompanying drawings. Apparently, the described embodiments are only some of the embodiments of the present application, rather than all the embodiments of the present application. It should be understood that the present application is not limited by the exemplary embodiments described here.
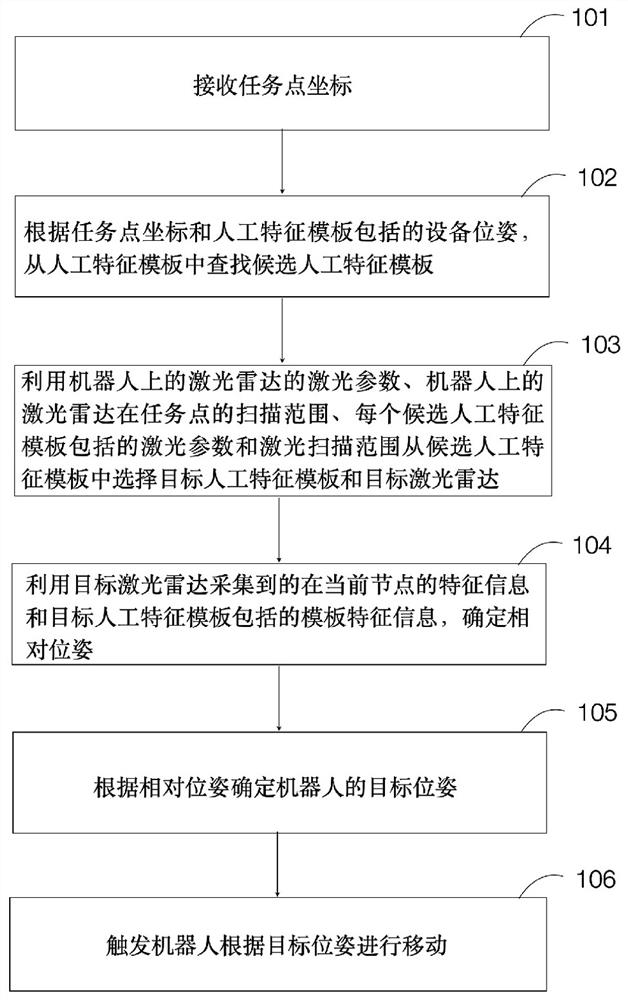
[0044] figure 1 It is a schematic flowchart of a robot task point positioning method shown in the embodiment of the present application. The robot task point positioning method can be applied to the robot. In this embodiment, the robot includes at least one laser radar, and the robot is pre-loaded with an artificial feature template. The artificial feature template includes but is not limited to: template feature information, equipment pose, laser parameters and laser scanning range.
[0045] In an example, the artificial feature template may further includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More