

Autonomous underwater vehicle trajectory tracking control method for time-varying dynamics
An underwater vehicle and autonomous vehicle technology, which is applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problem that the time-varying dynamic model cannot follow the general reference trajectory, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] A trajectory tracking control method for an autonomous underwater vehicle aimed at time-varying dynamics proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
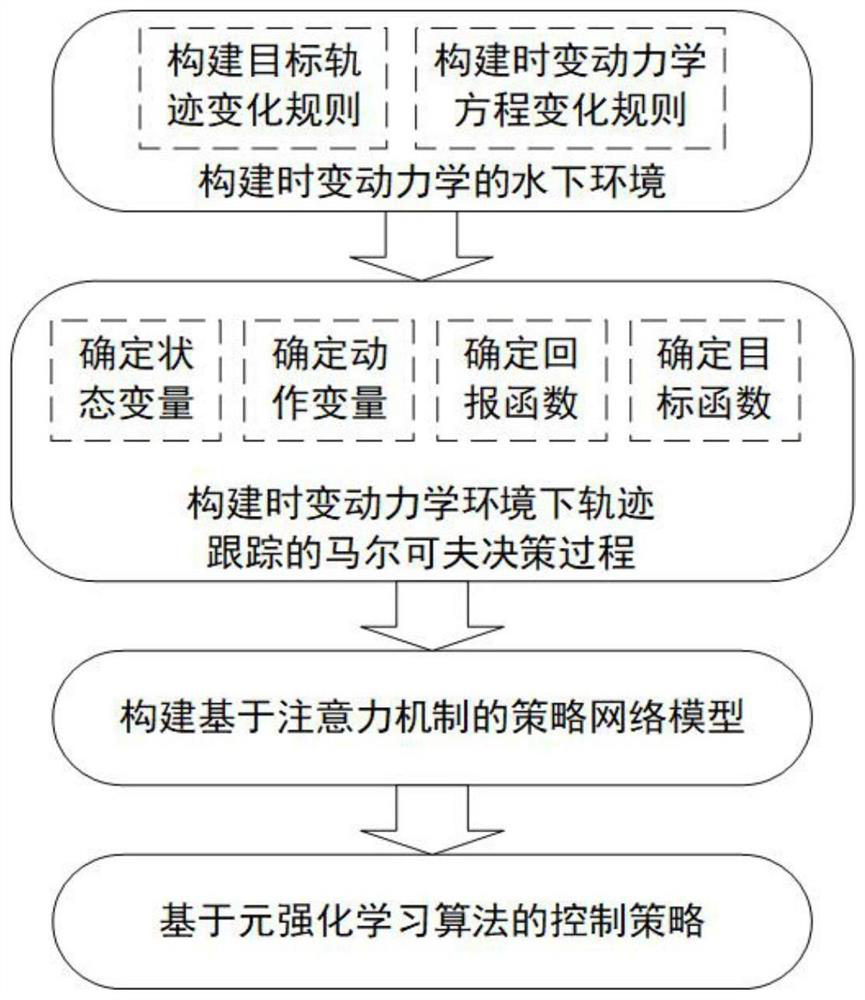
[0095] The present invention proposes an autonomous underwater vehicle trajectory tracking control method aimed at time-varying dynamics. The method includes establishing the AUV trajectory tracking control problem under the time-varying dynamics environment, establishing a Markov decision process model for the AUV trajectory tracking problem, and meta-enhanced The AUV trajectory tracking control method under the learning framework and the target strategy for solving the AUV trajectory tracking control; the overall process of the method is as follows figure 1 shown, including the following steps:
[0096] 1) Establish the trajectory tracking control problem of the underwater autonomous vehicle AUV under the time-varying...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More