

Graph-based 3D point cloud object instance segmentation method in out-of-order scene
A scene point and scene technology, applied in the field of image processing, can solve problems such as over-segmentation, affecting the segmentation effect, and under-segmentation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0044] Such as Figure 5 , the 3D point cloud object instance segmentation method based on the graph-based out-of-order scene of the present embodiment includes the following steps:
[0045] Step 1) Point cloud preprocessing: For the original out-of-sequence scene point cloud data, first apply the voxel downsampling method to simplify the original scene point cloud data, reduce the number of points, and then use statistical filtering to remove outliers.
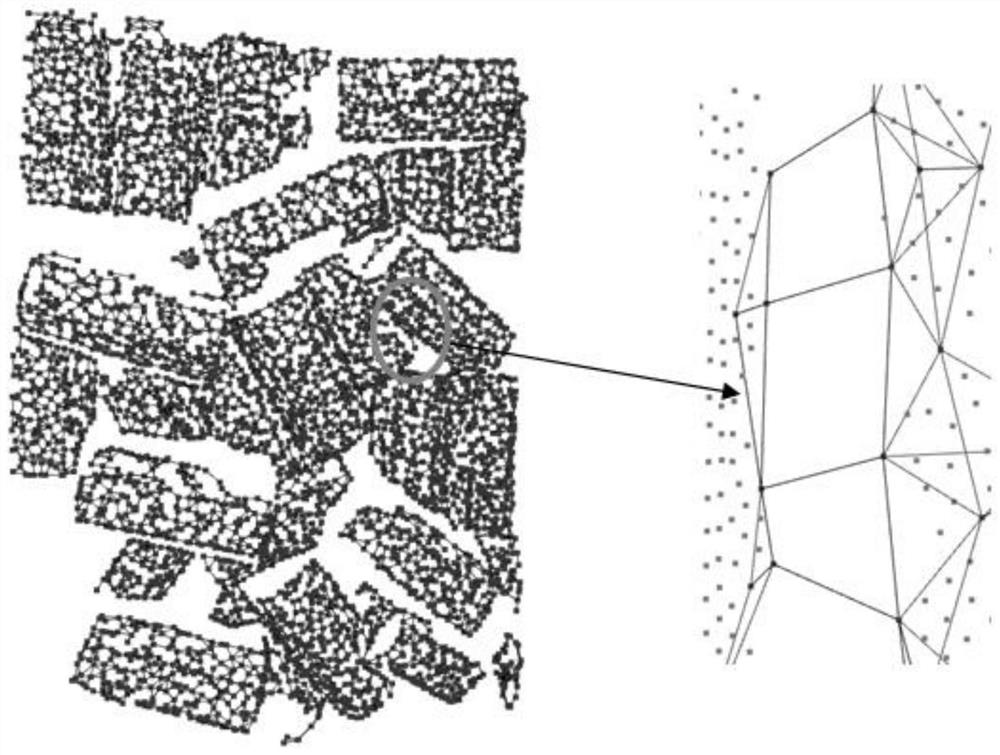
[0046] Step 2) Key point extraction and key point map generation: For the preprocessed scene point cloud, use the ISS algorithm to extract key points of the scene point cloud. According to the neighbor relationship between the key points, the specific method is: when two points are k-nearest neighbor points, connect the two points to form an edge. Let the generated graph be denoted as G(V,E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More