Convex polygon collision detection method
A technology of convex polygons and detection methods, applied in sports accessories, indoor games, video games, etc., can solve the problems of large computing resources and consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
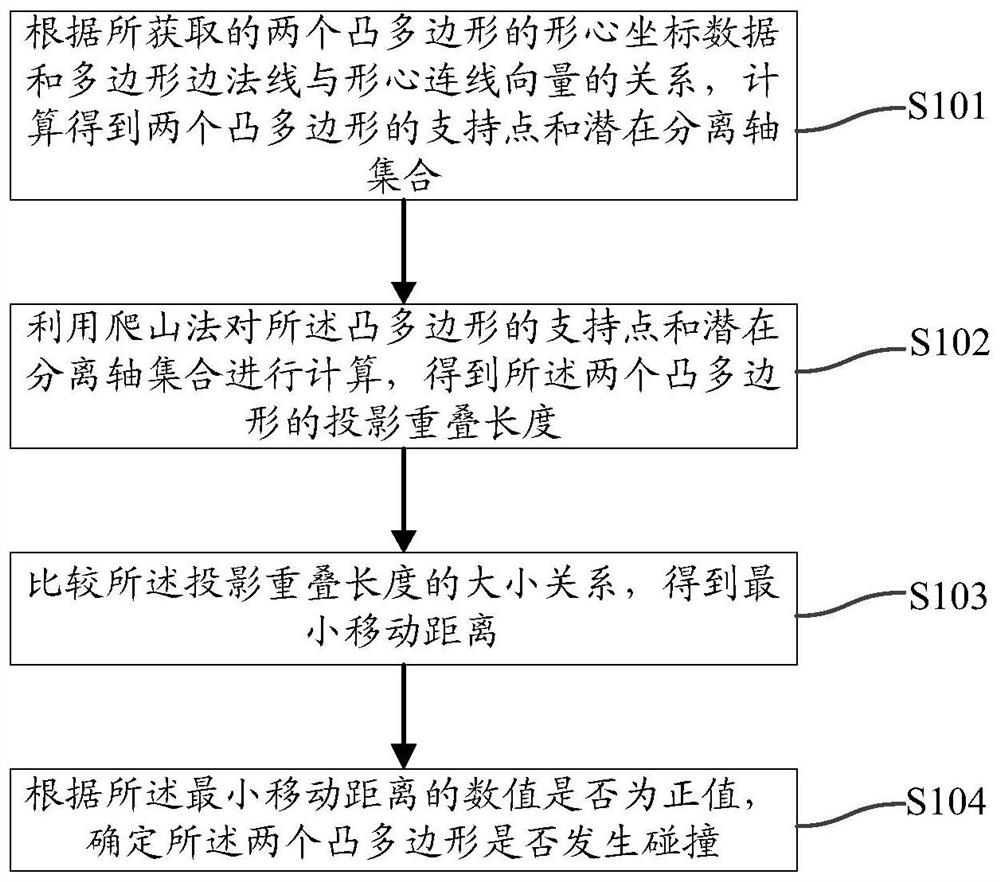
[0062] Example 1, please refer to figure 1 , figure 1 It is a flow chart of Embodiment 1 of a detection method for convex polygon collision of the present invention, including:
[0063] Step S101, according to the acquired centroid coordinate data of the two convex polygons and the relationship between the polygon edge normal and the centroid line vector, calculate the set of support points and potential separation axes of the two convex polygons;
[0064] Step S102, using the hill-climbing method to calculate the set of support points and potential separation axes of the convex polygon, to obtain the projected overlapping length of the two convex polygons;
[0065] Step S103, comparing the size relationship of the projected overlapping lengths to obtain the minimum moving distance;
[0066] Step S104, according to whether the value of the minimum moving distance is a positive value, determine whether the two convex polygons collide.
[0067] In the method for detecting col...
Embodiment 2
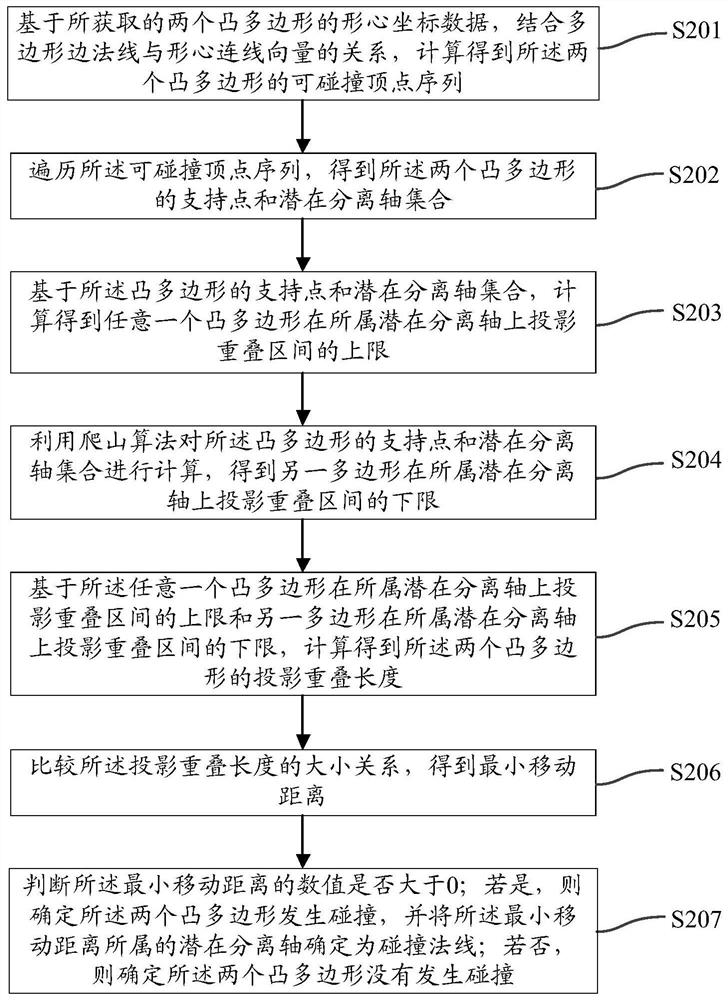
[0068] Example 2, please refer to figure 2 , figure 2 It is a flow chart of a detection method for a convex polygon collision of the present invention, including:
[0069] Step S201, based on the obtained centroid coordinate data of the two convex polygons, combined with the relationship between the polygon edge normal and the centroid line vector, calculate and obtain the collidable vertex sequence of the two convex polygons;
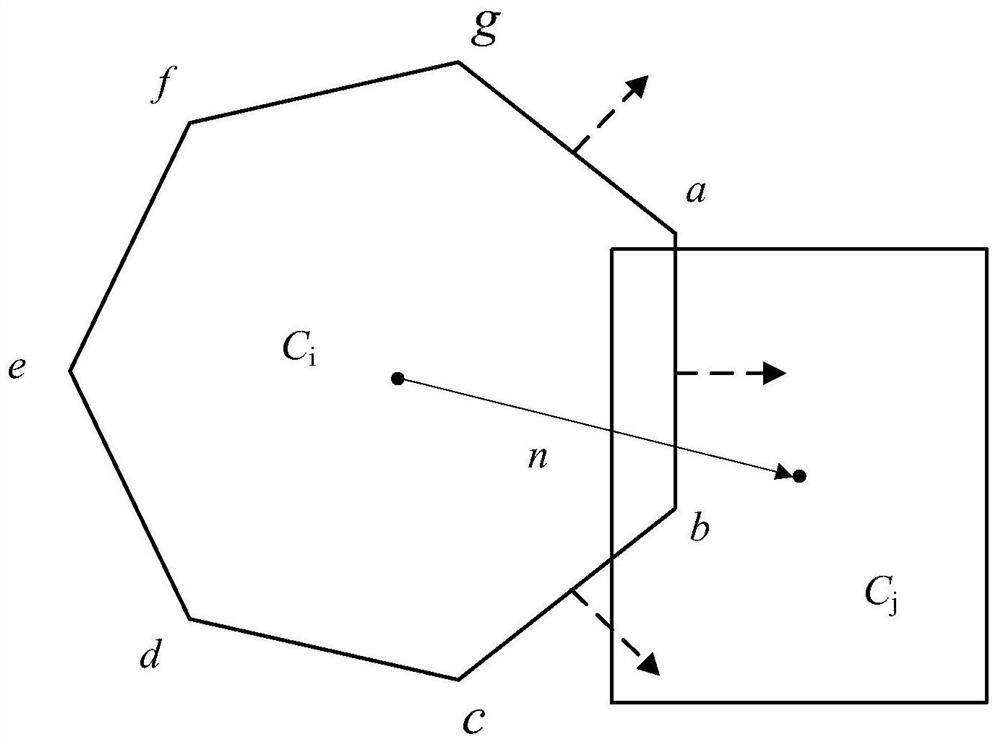
[0070] It should be noted that the order of the vertices of the convex polygon is arranged clockwise, and the normals point to the left side of the direction of the edge vector
[0071] In the embodiment of the present invention, the centroid coordinate data of two convex polygons are obtained first, and then the possible coordinates of the two convex polygons are calculated according to the centroid data and the relationship between the polygon side normal and the centroid line vector. Sequence of colliding vertices.
[0072] In specific implemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com