

Creep-resistant rope-driven mechanical finger
A kind of mechanical finger, anti-creep technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of changes in the grip force of the manipulator, aggravated metal creep, damage to the manipulator structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the purpose, technical solutions and advantages of the embodiments of the present disclosure clearer, the technical solutions of the embodiments of the present disclosure will be clearly and completely described below in conjunction with the accompanying drawings of the embodiments of the present disclosure. In order to maintain the following description of the embodiments of the present disclosure For clarity and conciseness, the present disclosure omits detailed descriptions of known functions and known components to avoid unnecessarily obscuring the concepts of the present invention.
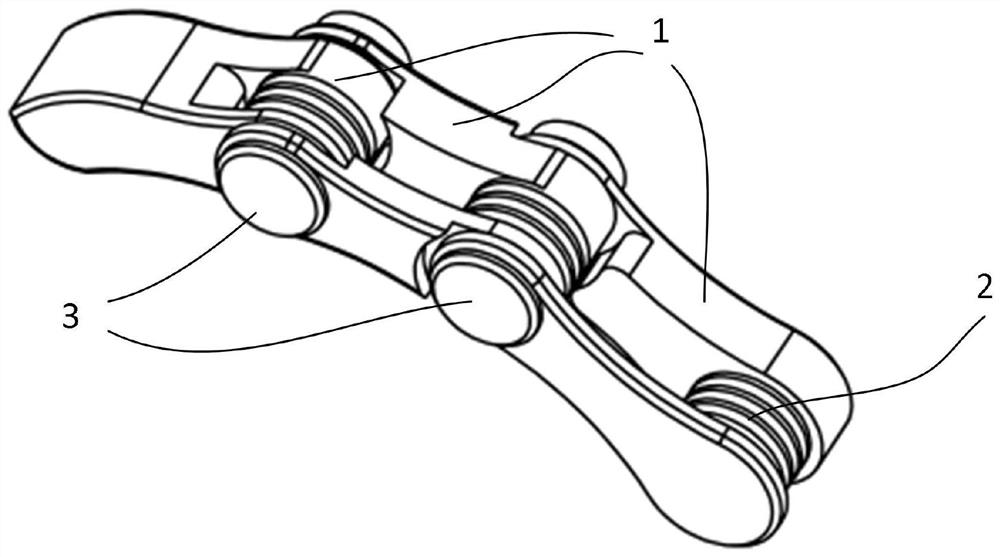
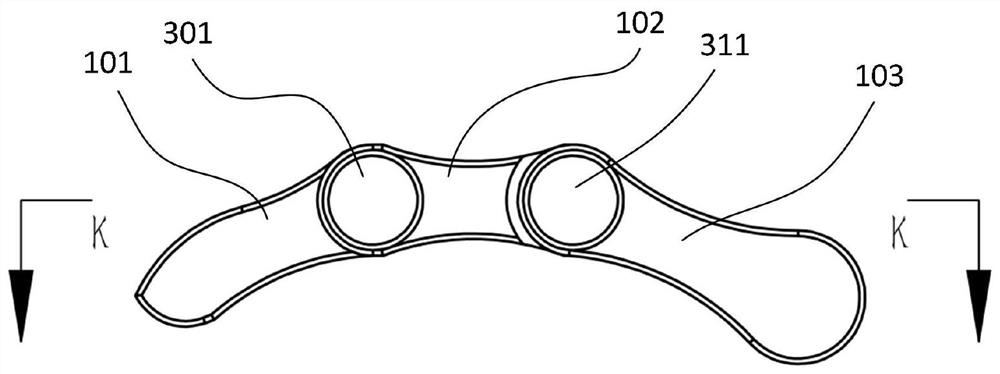
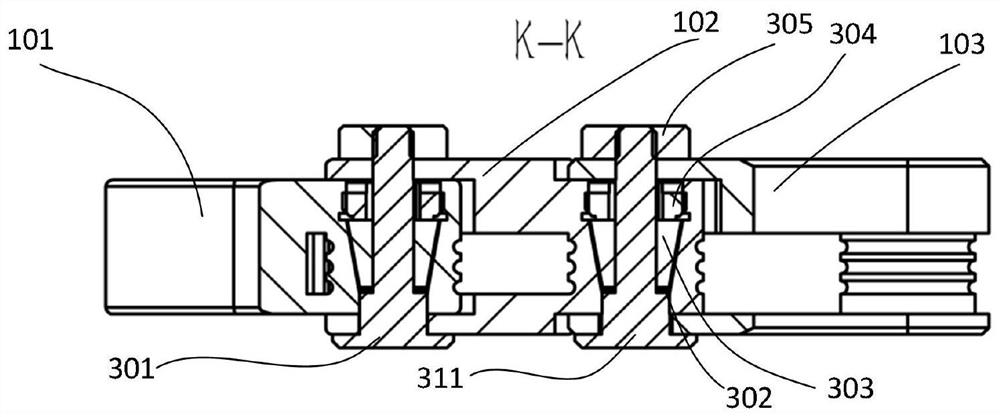
[0024] see Figure 1-7 , a creep-resistant rope-driven mechanical finger, including a knuckle 1, a rope-driven system 2 and a joint locking system 3;
[0025] The phalanx 1 includes a first phalanx 101, a second phalanx 102 and a third phalanx 103;
[0026] The first phalanx 101, the second phalanx 102 and the third phalanx 103 are all connected by the joint locking s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More