

Signboard identification method and device for automatic driving
An automatic driving and signage technology, applied in the field of navigation, can solve the problems of positioning technology error, position deviation of signboard apex, inability to accurately identify signboards, etc., and achieve the effect of improving accuracy, avoiding too small, and optimizing reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
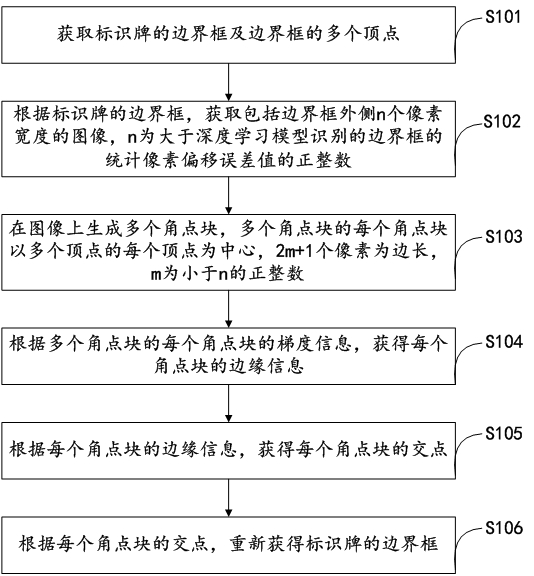
[0052] figure 1 It is a schematic flowchart of the identification plate recognition method for automatic driving shown in the embodiment of the present application.
[0053] see figure 1 , a identification plate recognition method for automatic driving, comprising:
[0054] In step S101, the bounding box of the identification plate and a plurality of vertices of the bounding box are acquired.
[0055] In one embodiment, the self-driving vehicle is provided with a photographing device, which includes but is not limited to a monocular camera. The monocular camera is arranged at a suitable position of the vehicle. For example, the monocular camera can be arranged at the front windshield of the vehicle or at the rearview mirror of the vehicle, so that the monocular camera can photograph images containing road signs during the automatic driving of the vehicle. image.
[0056] In one embodiment, the bounding box of the signboard and multiple vertices of the bounding box can be o...
Embodiment 2
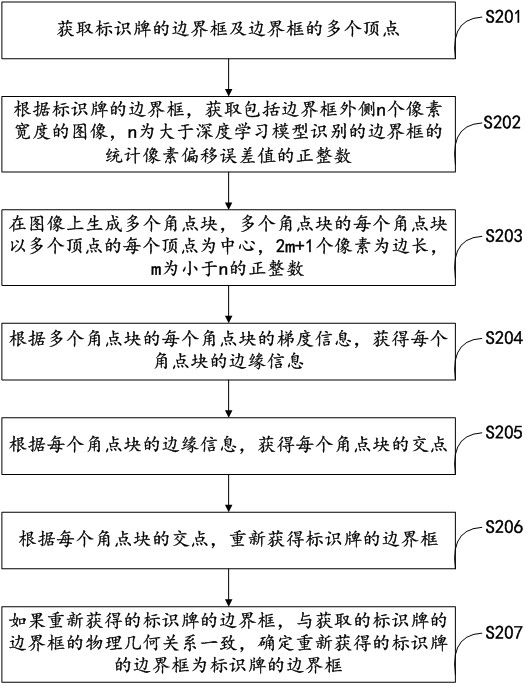
[0070] figure 2 It is another schematic flowchart of the identification plate recognition method for automatic driving shown in the embodiment of the present application.
[0071] see figure 2 , a identification plate recognition method for automatic driving, comprising:
[0072] In step S201, the bounding box of the identification plate and a plurality of vertices of the bounding box are acquired.
[0073] For this step, reference may be made to the description of step S101, which will not be repeated here.
[0074] In step S202, according to the bounding box of the signage, an image including a width of n pixels outside the bounding box is acquired, where n is a positive integer greater than the statistical pixel offset error value of the bounding box identified by the deep learning model.
[0075] In one embodiment, as Figure 4 As shown, the lower right corner of the bounding box 401 of the signboard outputted by the deep learning model according to the signboard ima...
Embodiment 3
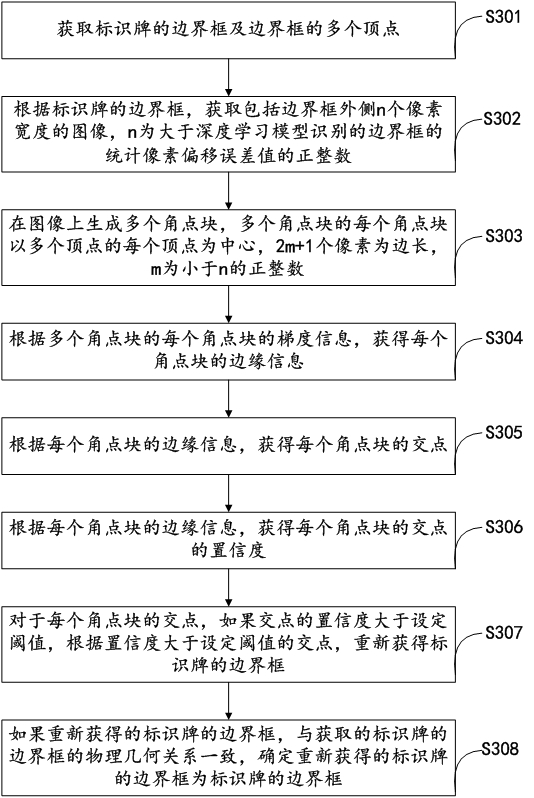
[0092] image 3 It is another schematic flowchart of the identification plate recognition method for automatic driving shown in the embodiment of the present application.
[0093] see image 3 , a identification plate recognition method for automatic driving, comprising:
[0094] In step S301, the bounding box of the identification plate and a plurality of vertices of the bounding box are acquired.
[0095] For this step, reference may be made to the description of step S101, which will not be repeated here.
[0096] In step S302, according to the bounding box of the signage, an image including a width of n pixels outside the bounding box is acquired, where n is a positive integer greater than the statistical pixel offset error value of the bounding box identified by the deep learning model.
[0097] For this step, reference may be made to the description of step S202, which will not be repeated here.
[0098] In step S303, a plurality of corner blocks are generated on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More