

Manufacturing and control method of rehabilitation gloves based on bidirectional drivers of honeycomb-like structures
A honeycomb structure and driver technology, which is applied in passive exercise equipment, physical therapy, etc., can solve the problems of high air pressure of the driver, increased air pressure of the driver, deformation of the driver and small output force, etc., and achieve the effect of large rotation angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0063] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
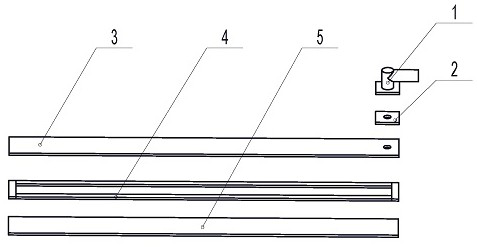
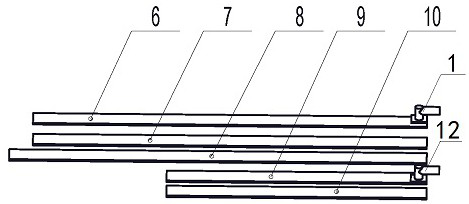
[0064] As shown in the figure, the rehabilitation glove based on the two-way driver imitating the honeycomb structure of the present invention includes five two-way drivers imitating the honeycomb structure and cotton gloves, and the two-way driver is fixed on the back of the glove by a magic cable tie;
[0065] The two-way driver includes a buckling airbag 11, an intermediate guide layer 8, and an extension airbag 13. The buckling airbag 11 is in a continuous bending state, and the middle guiding layer 8 is also in a continuous bending state. The buckling airbag 11 and the middle guiding layer 8 are arranged symmetrically, and the stretch airbag 13 is arranged under t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More