Quick dismounting mechanism for industrial robot clamping paw and dismounting method of quick dismounting mechanism
A technology for gripping grippers of industrial robots, applied in manipulators, program-controlled manipulators, chucks, etc., can solve problems such as damage to mechanical grippers and affect the efficiency of disassembly and assembly, so as to improve time, save disassembly time, and improve work efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
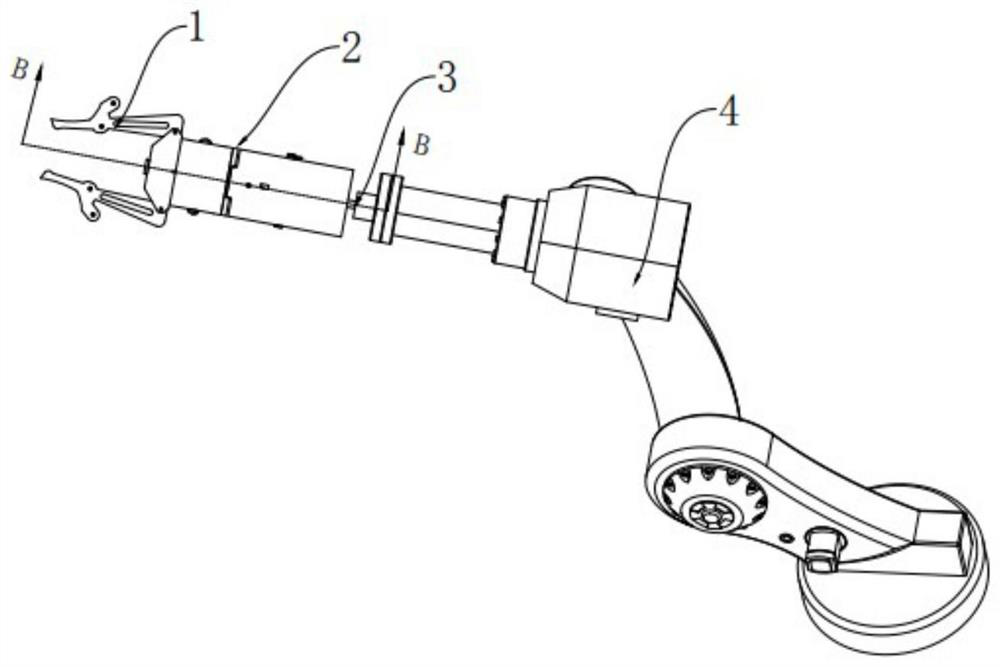
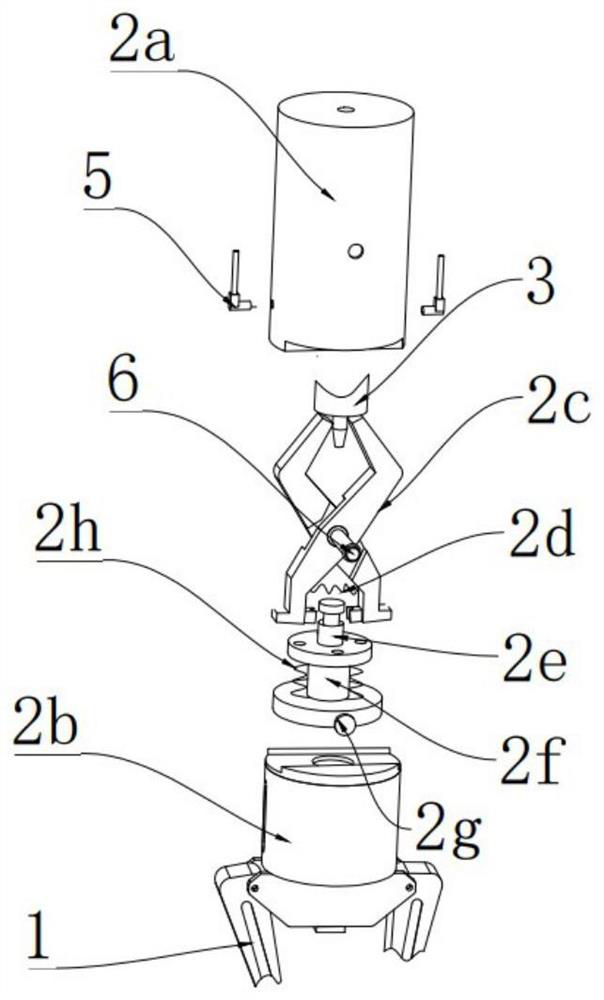
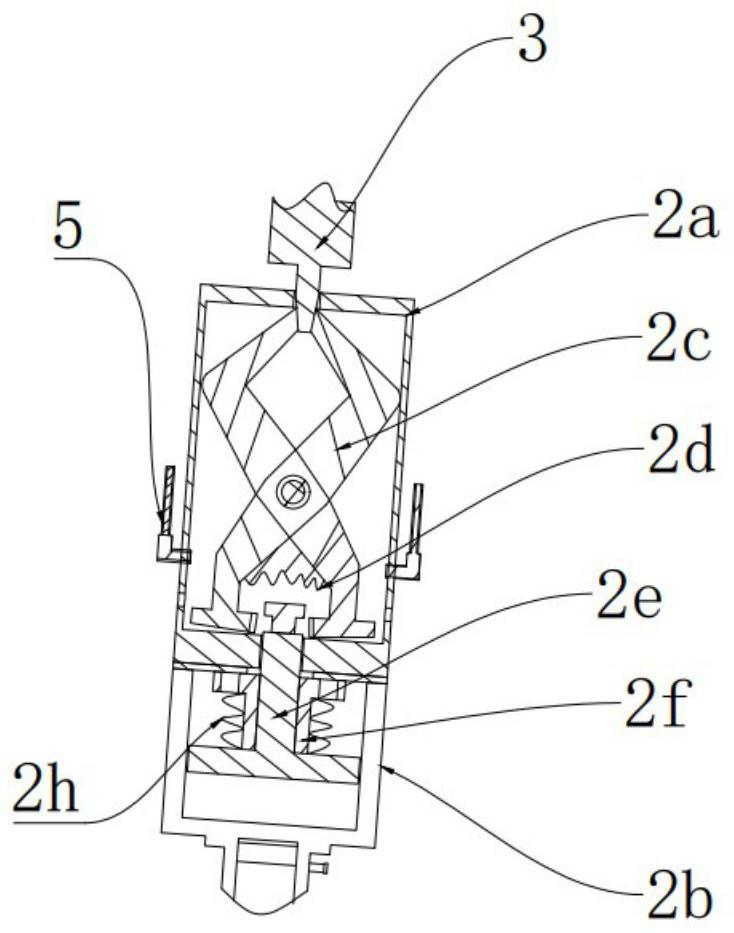
[0033] The present invention relates to a quick disassembly mechanism 2 for an industrial robot clamping claw 1. In practical applications, such as Figure 1 to Figure 6As shown, it includes two parts, the base component and the clamping component. Wherein the basic assembly includes a base, and a mechanical arm 4 arranged on the base, the clamping assembly includes a clamping claw 1, and a disassembly mechanism 2 fixedly connected between the clamping claw 1 and the mechanical arm 4, the disassembly mechanism 2 includes The connecting mechanism is a clamping mechanism that cooperates with the connecting mechanism, wherein the connecting mechanism is fixedly arranged on the clamping claw 1, and the clamping mechanism is fixedly arranged on the mechanical arm. In this embodiment, the connecting mechanism includes a connecting piece 2e, The connecting piece 2e is T-shaped, and the upper end of the connecting piece 2e is provided with an annular groove 21b structure, which is sle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More