Quadruped robot control method based on model predictive control optimization reinforcement learning
A model predictive control, quadruped robot technology, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of long-term training, extremely high data and computing power requirements, and achieve the goal of reducing data dependence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment
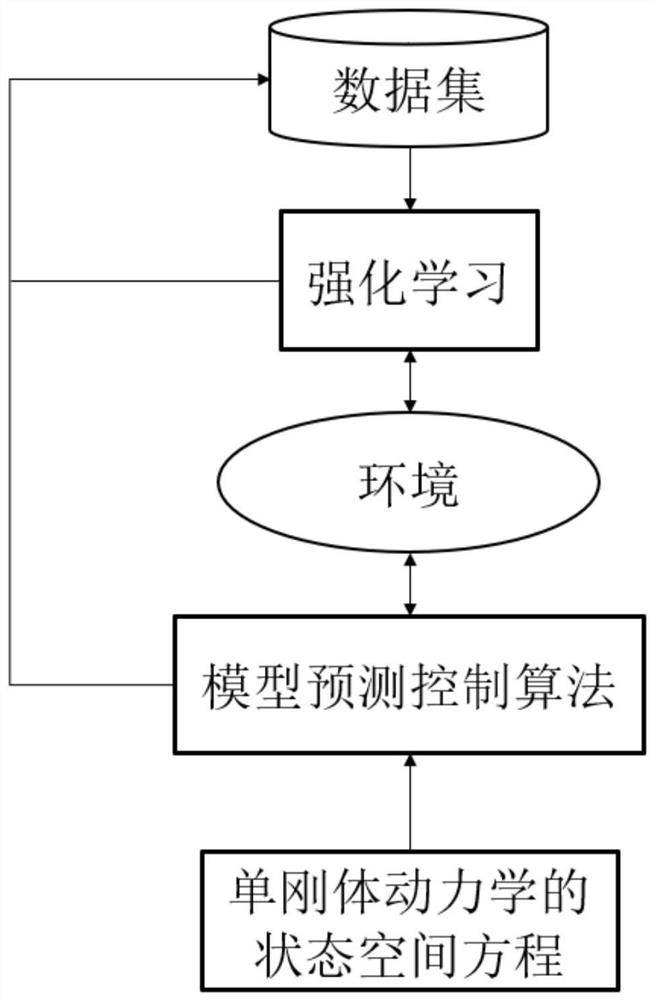
[0032] refer to figure 1 , a quadruped robot control method based on model predictive control optimization reinforcement learning, including the following steps:
[0033] Establish a dynamic model according to the physical parameters of the physical prototype, and convert the dynamic model into a state space equation; optimize the model predictive control according to the state space equation, and deploy the optimized model predictive control on the physical prototype; establish A reinforcement learning model, the reinforcement learning model interacts with the environment and model predictive control to train the physical prototype at the same time.
[0034] Compared with the existing technology, the quadruped robot control method based on model predictive control to optimize reinforcement learning reduces the meaningless data generated during the reinforcement learning training process, and reduces the demand for computing power through model-guided training, enabling direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com