

Target person following control method and system of mobile robot
A mobile robot and follow-up control technology, which is applied to instruments, computer components, image analysis, etc., can solve the problems of price restrictions, difficulty in clearly distinguishing different personnel, and inability to use it, so as to achieve the effect of follow-up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] This embodiment provides a target person following control method of a mobile robot;
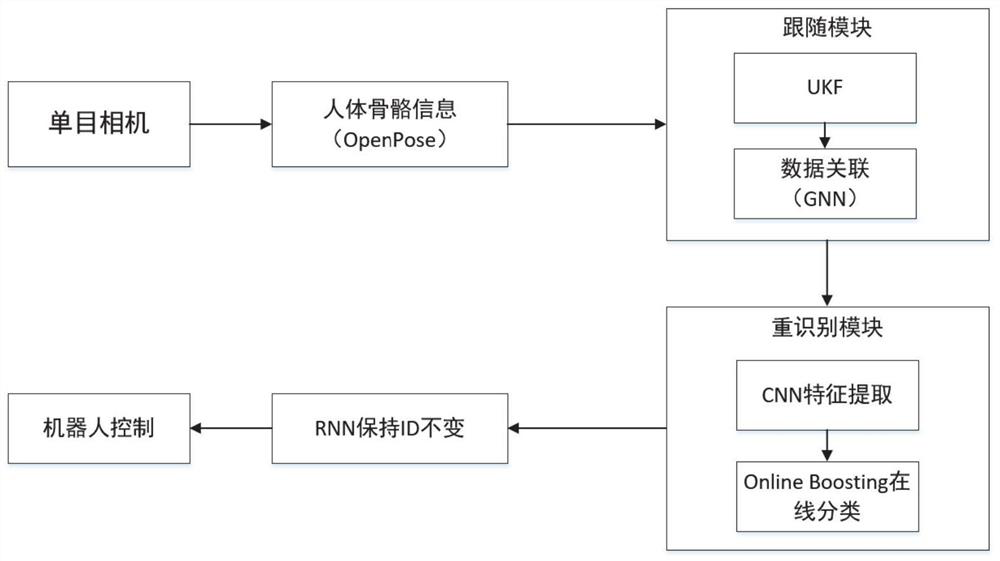
[0043] Such as figure 1 As shown, a target person following control method for a mobile robot includes:
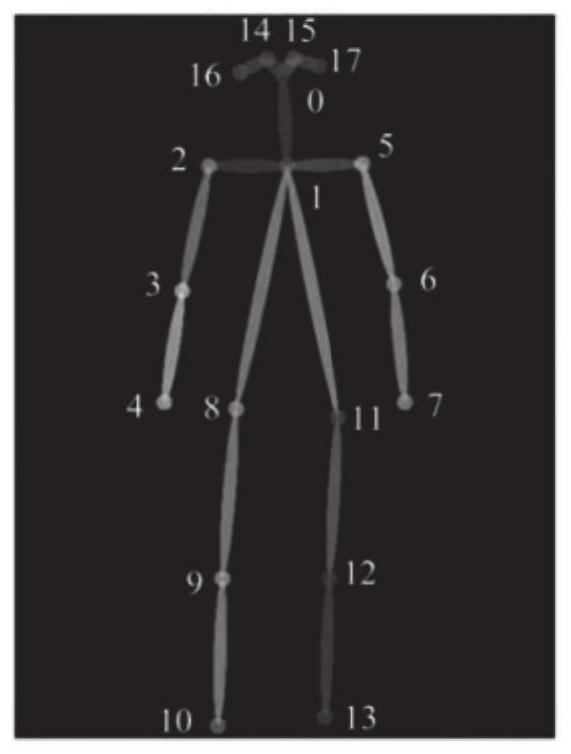
[0044] S101: Initialization process: Obtain the image of the target person to be followed; obtain the appearance characteristics of the target person to be followed, set the number ID of the target person to be followed; obtain the bone joint information of the target person to be followed, and set the midpoint position of the left and right ankles and the neck joint point position as the target position to be followed;
[0045] S102: Following process: judging whether the position of the middle point of the left and right ankles and the position of the neck joint point of the target person to be followed is detected; and if the target person to be followed is detected, the mobile robot continues to track the target person to be followed;
[0046] S103: Re-identification process...
Embodiment 2
[0122] This embodiment provides a target personnel following control system of a mobile robot;
[0123] A target person following control system for a mobile robot, comprising:
[0124] The initialization module is configured to: obtain the image of the target person to be followed; obtain the appearance characteristics of the target person to be followed, set the number ID of the target person to be followed; obtain the bone joint information of the target person to be followed, and set the position of the middle point of the left and right ankles and The position of the neck joint point is used as the target position to be followed;
[0125] The following module is configured to: determine whether the position of the middle point of the left and right ankles and the position of the neck joint point of the target person to be followed is detected; and if the target person to be followed is detected, follow the target person to be followed;
[0126] A re-identification module...
Embodiment 3
[0131] This embodiment also provides an electronic device, including: one or more processors, one or more memories, and one or more computer programs; wherein, the processor is connected to the memory, and the one or more computer programs are programmed Stored in the memory, when the electronic device is running, the processor executes one or more computer programs stored in the memory, so that the electronic device executes the method described in Embodiment 1 above.
[0132] It should be understood that in this embodiment, the processor can be a central processing unit CPU, and the processor can also be other general-purpose processors, digital signal processors DSP, application specific integrated circuits ASIC, off-the-shelf programmable gate array FPGA or other programmable logic devices , discrete gate or transistor logic devices, discrete hardware components, etc. A general-purpose processor may be a microprocessor, or the processor may be any conventional processor, o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More