

A kind of hand area tracking method and system
A hand and region technology, applied in the field of gesture recognition, can solve problems such as the inability to guarantee the tracking accuracy of the hand region, the large gap in real-time accuracy of the mobile AR assembly system, large storage space, and high hardware configuration in the operating space, etc., to achieve Accurate tracking, reduced impact, and improved tracking speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0064] The tracking and registration method of mobile AR assembly system with natural fingertip interaction can provide support for the application of natural fingertip interaction in AR assembly system through adaptive correlation filtering of hand area tracking, making natural video sequence hand area tracking a The natural fingertips move the basis of the AR assembly system, so it is necessary to accurately track the hand area in real time even in complex environments such as hand deformation, illumination, scale, and rotation, and at the same time solve the target template that exists in the hand area tracking. Drift problem has become a key problem that needs to be solved in the natural fingertip mobile AR assembly system. Existing SLAM technology and deep learning methods cannot guarantee the real-time and accuracy of hand area tracking.
[0065] In this regard, this embodiment 1 provides a hand area tracking method, which utilizes the interactive control theory and the ...
Embodiment 2
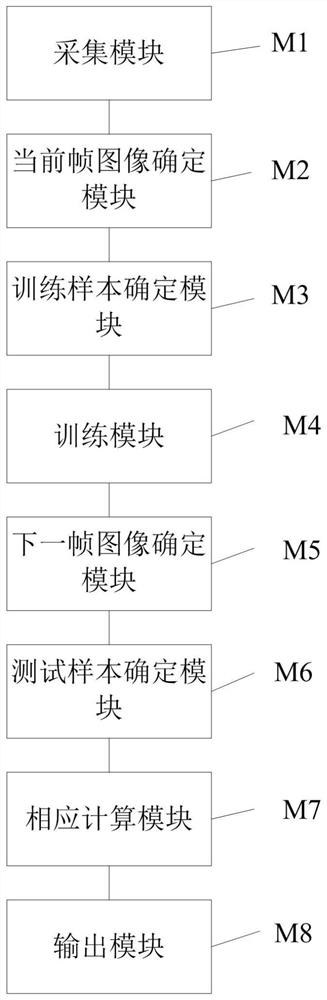
[0137] see image 3 , this embodiment also provides a hand area tracking system, including:
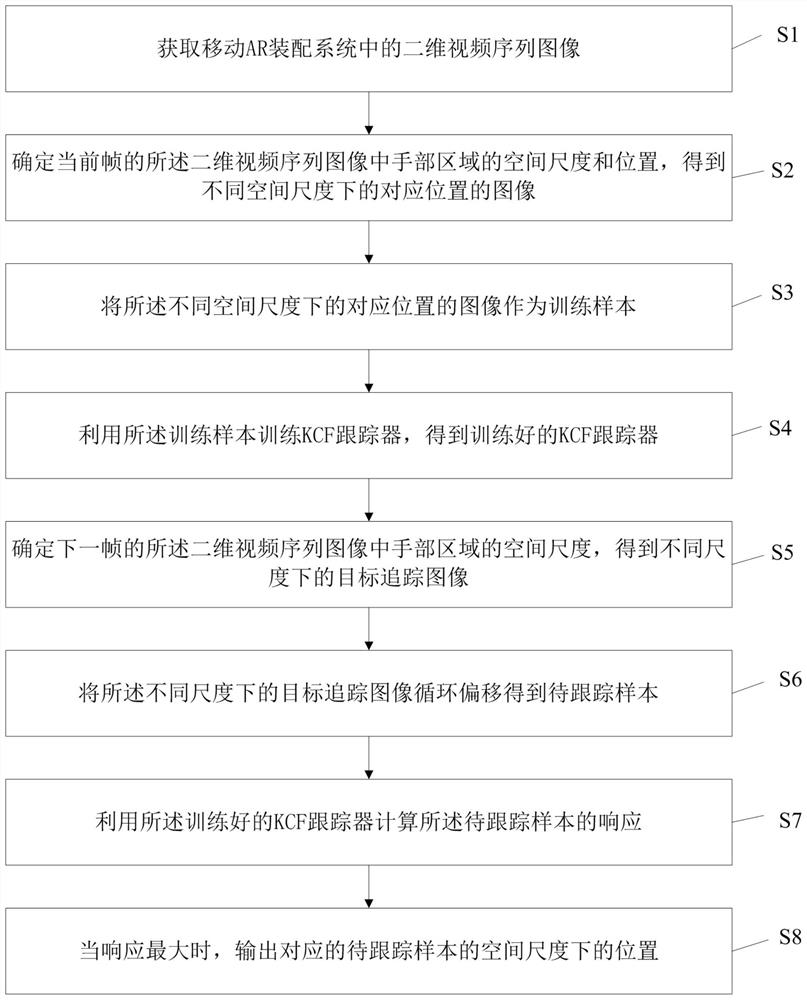
[0138] The acquisition module M1 is used to acquire two-dimensional video sequence images in the mobile AR assembly system;
[0139] The current frame image determination module M2 is used to determine the spatial scale and position of the hand region in the two-dimensional video sequence image of the current frame, and obtain images of corresponding positions under different spatial scales;
[0140] The training sample determination module M3 is used to use the images of the corresponding positions under the different spatial scales as the training samples;
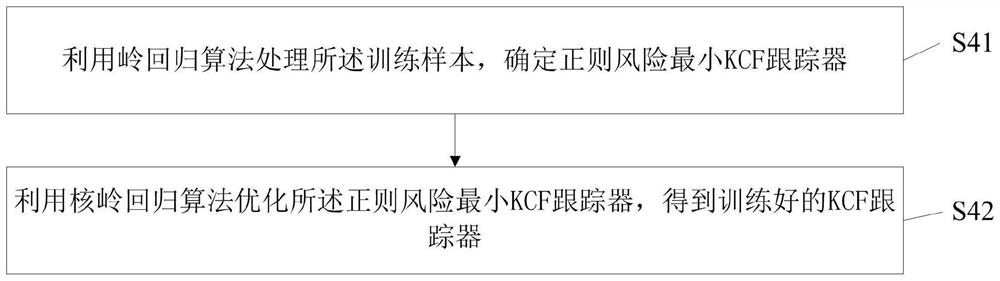
[0141] The training module M4 is used to train the KCF tracker using the training sample to obtain the trained KCF tracker;
[0142] The next frame image determination module M5 is used to determine the spatial scale of the hand region in the two-dimensional video sequence image of the next frame, and obtain target tracking im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More