

Cluster system formation obstacle avoidance control method
A technology of cluster system and control method, which is applied in the direction of three-dimensional position/channel control, etc., can solve the problems of inability to apply system time, discrete, etc., and achieve the effect of reducing the number of communications and reducing the frequency of communications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
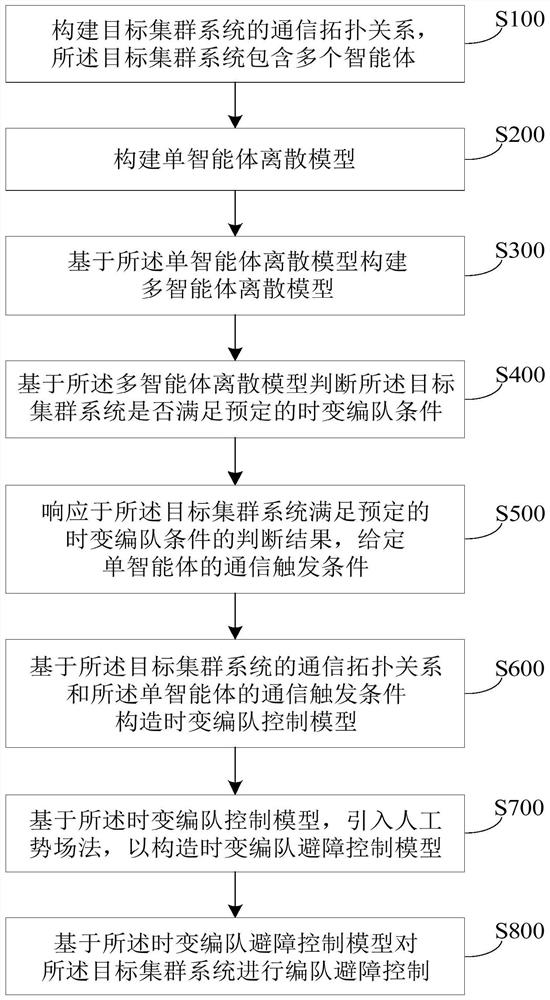
[0072] Example: figure 1 It shows the flow chart of realizing the obstacle avoidance control method of the formation of the cluster system according to the embodiment of the present invention. refer to figure 1 , the cluster system formation obstacle avoidance control method of the embodiment of the present invention comprises the following steps:
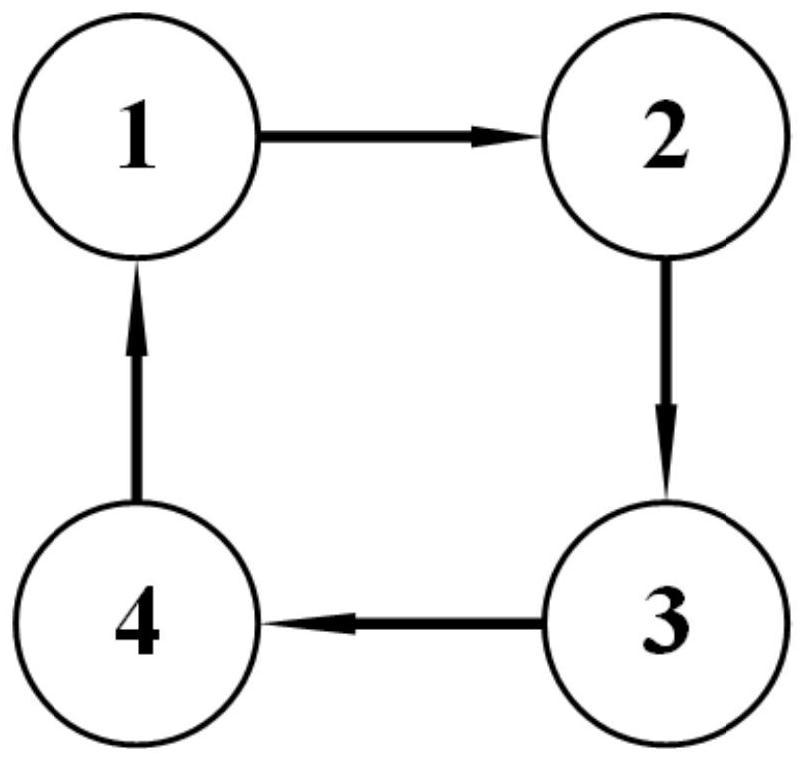
[0073] S100. Construct a communication topology relationship of a target cluster system, where the target cluster system includes multiple agents;
[0074] S200. Constructing a single-agent discrete model;
[0075] S300. Construct a multi-agent discrete model based on the single-agent discrete model;
[0076] S400. Determine whether the target cluster system satisfies a predetermined time-varying formation condition based on the multi-agent discrete model;
[0077] S500. In response to the judgment result that the target cluster system satisfies a predetermined time-varying formation condition, specify a communication trigger c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More