

Unmanned aerial vehicle cluster autonomous formation control method imitating migrant bird migration behavior
A control method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve the problem of high communication ability and computing ability, low reliability, and difficulty in meeting expectations Effect and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The effectiveness of the method proposed by the present invention is verified below through a specific example of autonomous formation control of UAVs. The experimental computer configuration is Intel Core i7-8750H processor, 2.20GHz main frequency, 16G memory, and the software is MATLAB2020a version.
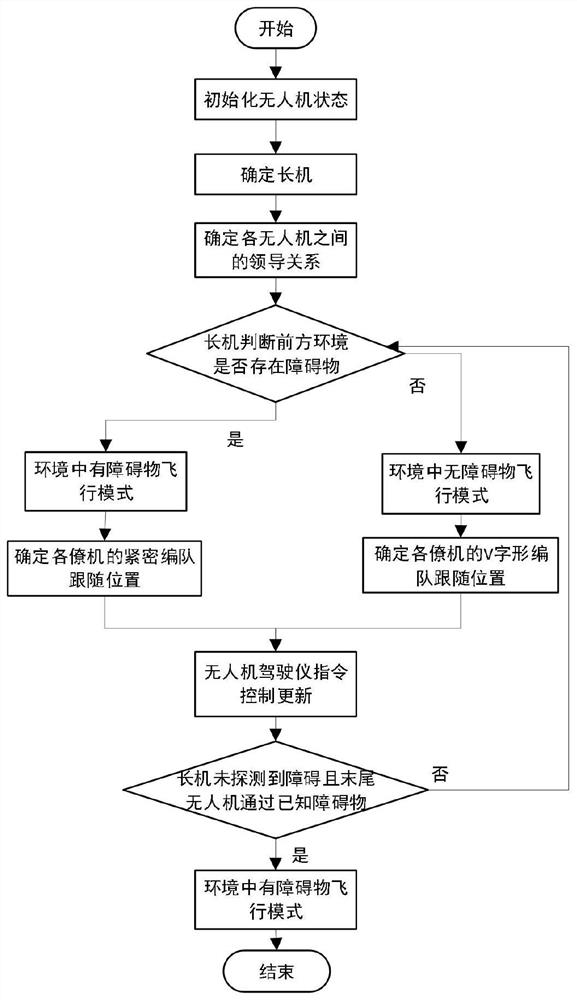
[0054] The concrete steps of this method are as follows:
[0055] Step 1: UAV cluster initialization
[0056] Randomly generate the initial states of 5 UAVs: UAV 1 to UAV 5, the flight speeds are 210m / s, 195m / s, 175m / s, 200m / s and 230m / s respectively, along the X axis Forward flight, flight altitudes are 5000m, 5050m, 5100m, 4900m and 4800m respectively, space position coordinates are [0, -20], [0,10], [-10, -30], [-20,30] , and [-30,30], the heading angles are 15°, 20°, 10°, 0° and -10° respectively, and the altitude change rate is 0.
[0057] Step 2: Determine the main machine
[0058] Since the cluster is flying forward along the X axis, among the five drone clust...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More