

Obstacle identification method and system based on 3D laser point cloud
An obstacle recognition and laser point cloud technology, applied in the field of obstacle detection, can solve the problems of inability to meet the needs of indoor and outdoor three-dimensional complex environment obstacle avoidance, high obstacle false detection rate, and reduced accuracy, so as to improve the efficiency of point cloud segmentation , the effect of reducing the search range and improving the processing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0039] Such as figure 1 As shown, Embodiment 1 of the present disclosure provides an obstacle recognition method based on a 3D laser point cloud, including the following process:
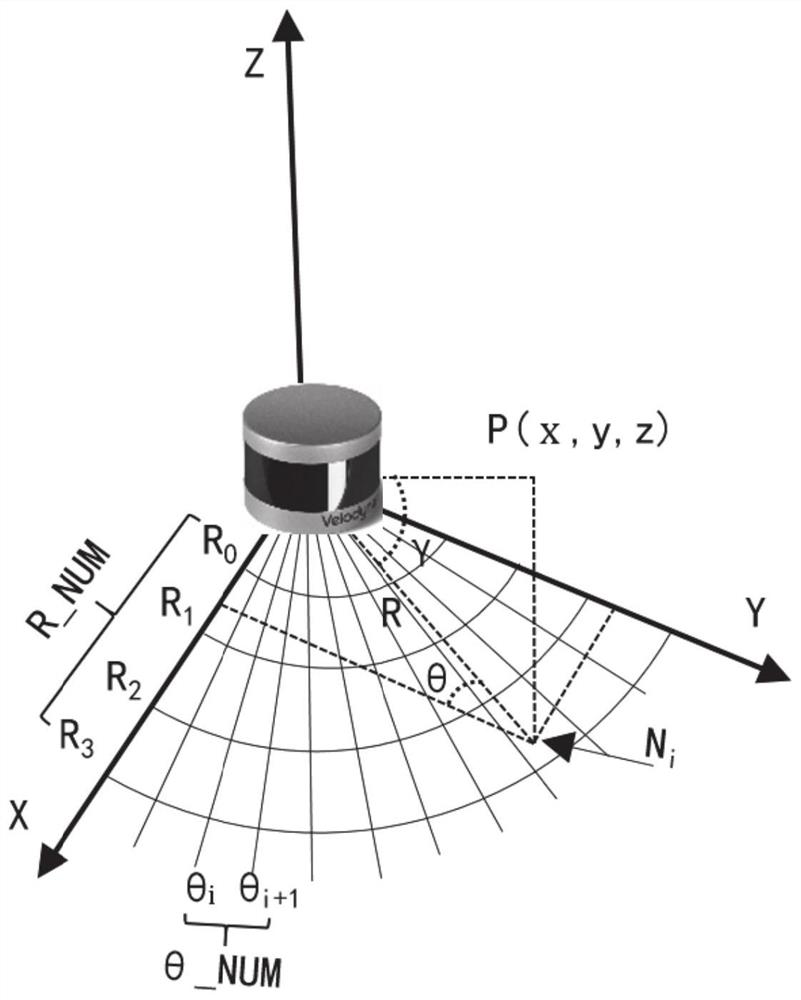
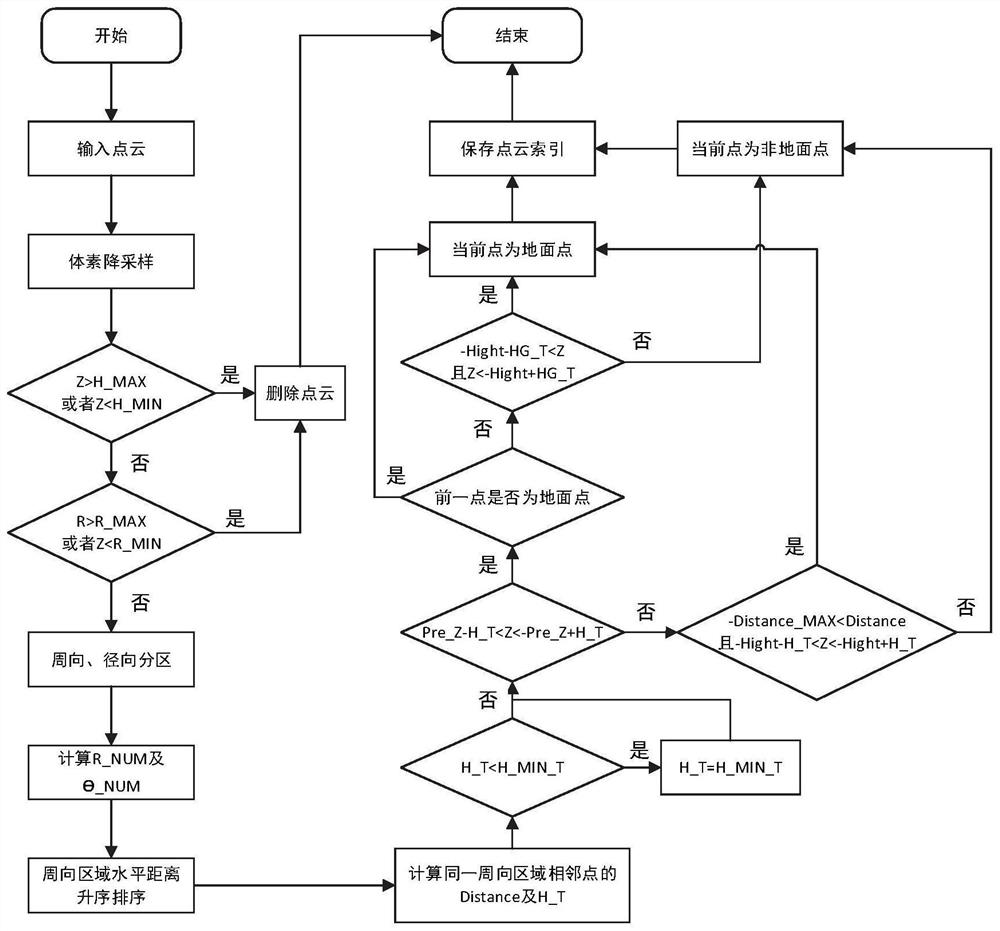
[0040] S1: Obtain 3D environment laser point cloud data, based on preprocessing, circumferential and radial rasterization processing of 3D environment laser point cloud data, to achieve efficient real-time ground segmentation;
[0041] S2: By processing the segmented non-terrestrial laser point cloud, two-dimensional European clustering is used to mark obstacles in each area;
[0042] S3: Through the cuboid model, the clustering is visualized and packaged to obtain the position and size of obstacles, so as to realize accurate identification of obstacles.
[0043] In S1, it specifically includes:
[0044] S1.1: Use multi-line lidar to obtain the original point cloud data of the 3D environment. Since the number of point clouds is very large, the original point cloud is preprocessed by voxel downsamp...
Embodiment 2
[0065] Embodiment 2 of the present disclosure provides an obstacle recognition system based on 3D laser point cloud, including:
[0066] The data acquisition module is configured to: acquire laser point cloud data of the three-dimensional environment;
[0067] The point cloud processing module is configured to: perform ground segmentation processing on the three-dimensional environment laser point cloud data, and obtain non-ground laser point cloud data;
[0068] The point cloud clustering module is configured to: partition non-terrestrial laser point cloud data, and use two-dimensional European clustering to mark obstacles in each partition;
[0069] The obstacle identification module is configured to: use a cuboid model to package the clustering results to obtain the position and size of the obstacle.
[0070] The working method of the system is the same as the obstacle recognition method based on the 3D laser point cloud provided in Embodiment 1, and will not be repeated h...
Embodiment 3
[0072] Embodiment 3 of the present disclosure provides a computer-readable storage medium, on which a program is stored. When the program is executed by a processor, the method of obstacle recognition based on 3D laser point cloud as described in Embodiment 1 of the present disclosure is implemented. step.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More