

Fuzzy rule-based man-machine co-driving control right flexible transfer method and system
A transfer method and technology of control rights, applied in the direction of control devices, driver input parameters, vehicle components, etc., can solve problems such as unfavorable promotion, man-machine conflict, and incomplete consideration of impact, so as to ensure driving experience and good flexibility Effect of shifting and improving comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
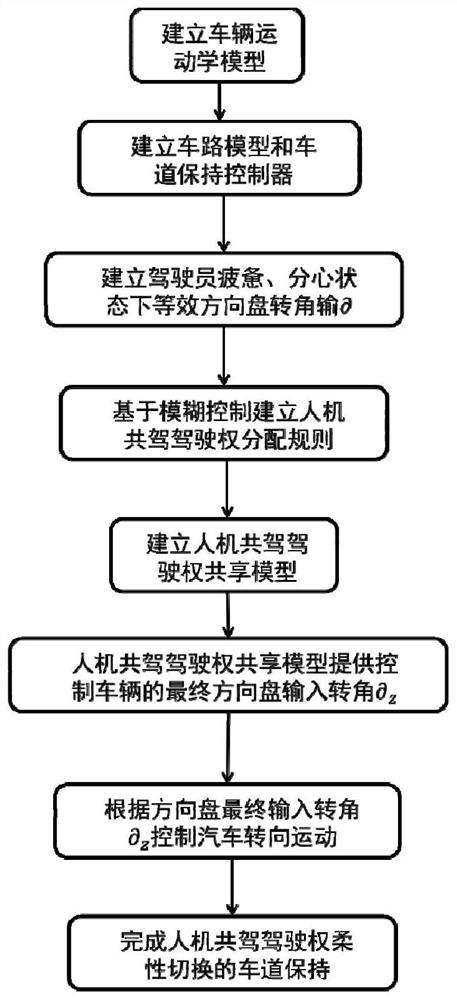
[0074] According to the present invention, a fuzzy-rule-based method for flexible transfer of control rights for man-machine co-driving includes:
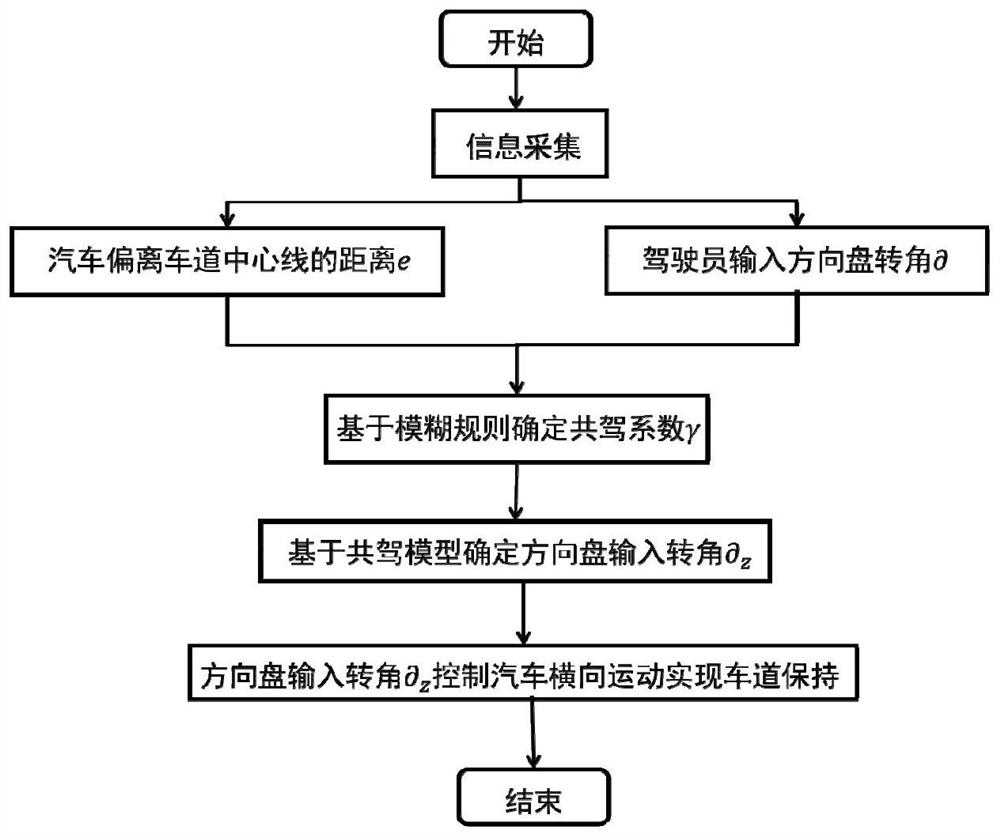
[0075] Step S1: collect information on the steering wheel angle input by the driver and the distance of the center of mass of the vehicle from the centerline of the lane;
[0076] Step S2: Establish the kinematic model of the vehicle, establish a steering controller based on the kinematic model of the vehicle to control the steering, and obtain the target steering angle of the steering wheel
[0077] Step S3: Construct a random function to simulate the steering wheel angle input of the driver in the state of fatigue and distraction, so that the vehicle will deviate from the lane during the preset time period, and simulate the driving situation of the driver in the state of distraction and fatigue;
[0078] Step S4: According to the input of the steering wheel angle and the distance information of the center of mass of the vehicle...
Embodiment 2
[0123] Embodiment 2 is a preferred example of embodiment 1
[0124] Such as figure 1 As shown, a fuzzy-rule-based method for flexible transfer of control rights for man-machine co-driving according to the present invention includes the following steps:
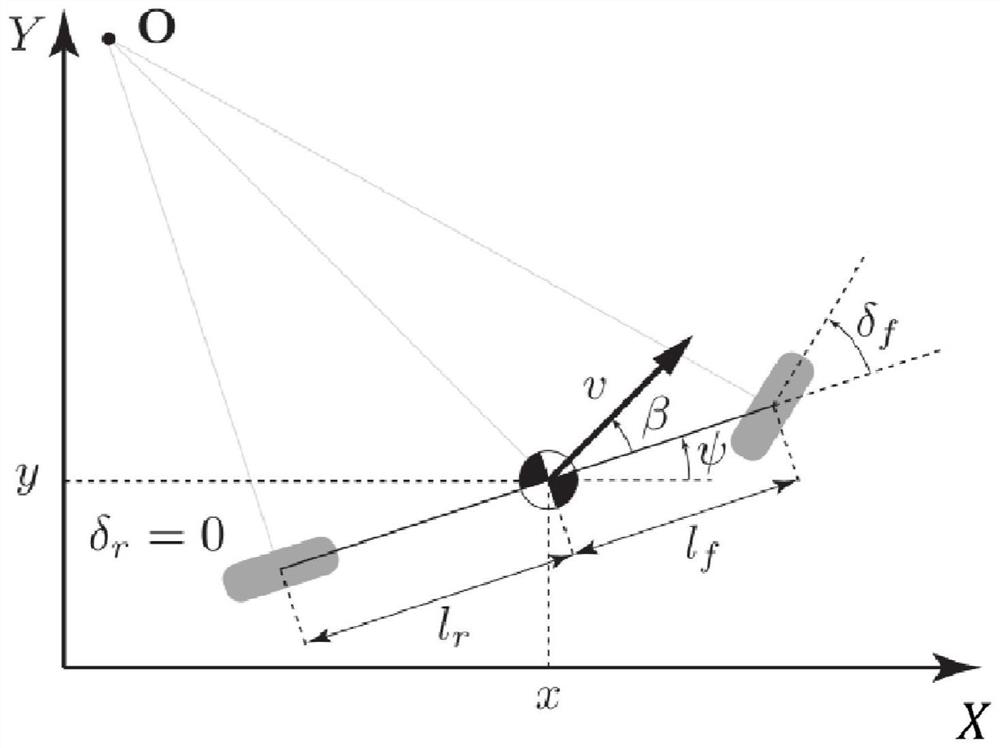
[0125] Step (1): If image 3 As shown, the kinematics analysis of the intelligent vehicle is simplified to the bicycle model to establish the kinematics model of the vehicle. The vertical motion of the vehicle is ignored, and it is simplified to a two-dimensional plane moving object. The steering wheel angle is used to replace the front tire angle, and the rear The wheel does not deflect, specifically as follows:
[0126] Carry out kinematics analysis on the vehicle, and simplify it to the bicycle model to establish its kinematics model, the state equation is:
[0127] x t+1 =x t +v t cos(φ t +β)*dt (1)
[0128] the y t+1 =y t +v t sin(φ t +β)*dt (2)
[0129]
[0130] v t+1 =v t +a*dt (4)
[0131] In the for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More