

Report generation method and device, robot and readable storage medium
A report generation and robot technology, applied in the field of robotics, can solve the problems of complex robot verification operation, low verification efficiency, poor user experience, etc., and achieve the effect of improving verification efficiency and accuracy, saving time and energy, and optimizing robot structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
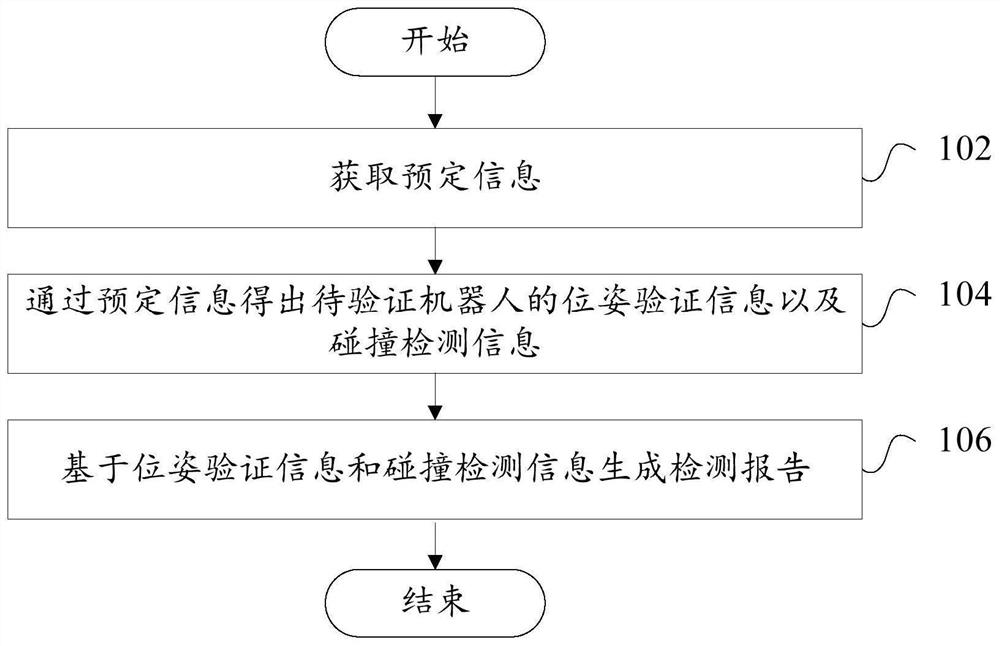
[0061] Such as figure 1 As shown, in the embodiment of the first aspect of the present invention, a method for generating a report is provided, and the method for generating a report includes:
[0062] Step 102, obtaining reservation information;
[0063] Step 104, obtain the pose verification information and collision detection information of the robot to be verified through predetermined information;
[0064] Step 106, generating a detection report based on the pose verification information and the collision detection information.
[0065] In this embodiment, the report generation method is applied in the field of robot intelligence, and is used to generate a report for users to understand the status of the robot during the offline design of the robot and the simulation process of the robot. Specifically, the steps of the report generating method are as follows: Step 1, obtain predetermined information; the predetermined information is predetermined work information of the...
Embodiment 2
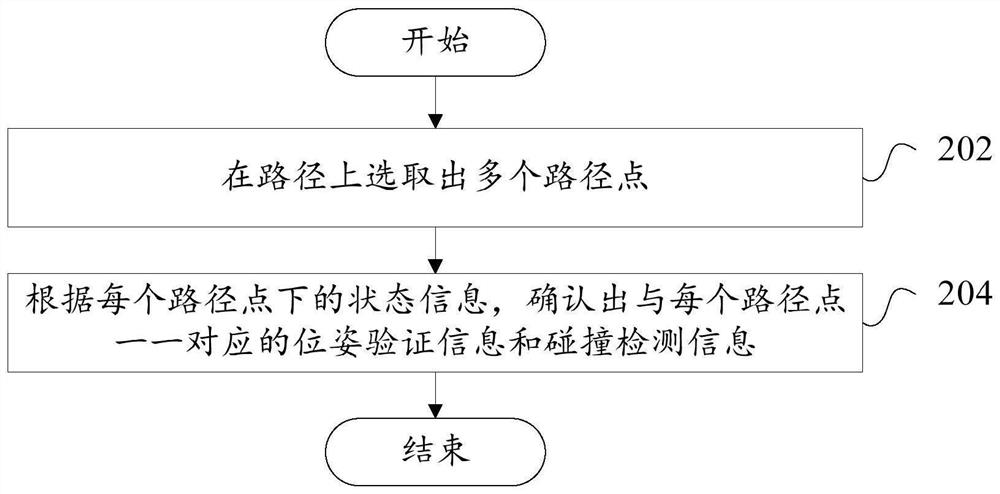
[0068] Such as figure 2 As shown, in the embodiment of the second aspect of the present invention, the predetermined information includes the path information of the robot during the working process, and the step of obtaining the pose verification information and collision detection information of the robot to be verified through the predetermined information includes:
[0069] Step 202, selecting multiple path points on the path;
[0070] Step 204, according to the state information under each waypoint, confirm the pose verification information and collision detection information corresponding to each waypoint one by one.
[0071] In this embodiment, the type of information included in the predetermined information is firstly limited. Specifically, the predetermined information includes the path information of the robot during the working process, and the path information is used to reflect the movement trajectory of the robot during the processing process. , when the tooli...
Embodiment 3
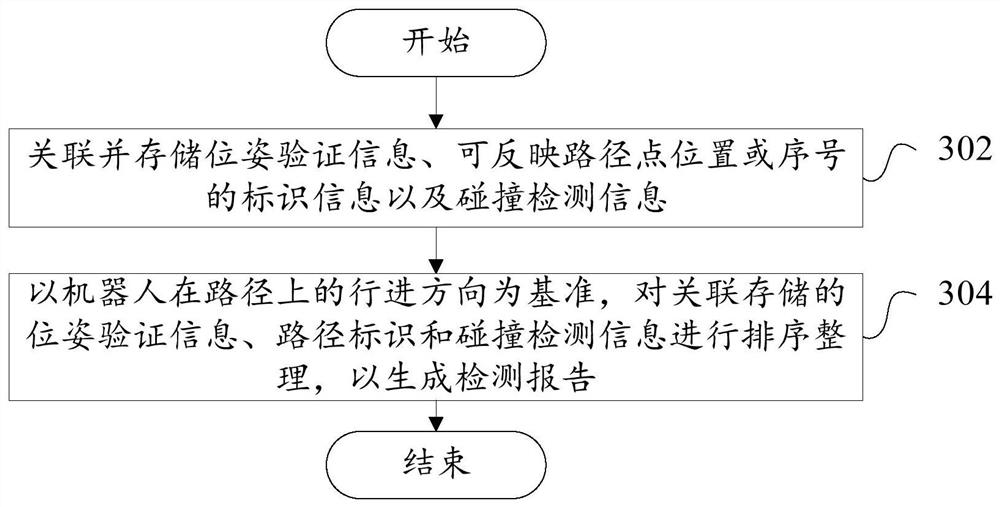
[0074] Such as image 3 As shown, in the embodiment of the third aspect of the present invention, the step of generating a detection report based on the pose verification information and collision detection information specifically includes:
[0075] Step 302, associating and storing pose verification information, identification information that can reflect the position or serial number of the waypoint, and collision detection information;
[0076] Step 304 , based on the moving direction of the robot on the path, sort and organize the associated stored pose verification information, path identification and collision detection information to generate a detection report.
[0077] In this embodiment, it can be seen from the foregoing embodiments that after confirming the pose verification information and collision detection information corresponding to each way point according to the state information under each way point, multiple information groups can be obtained , where eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More