Monocular camera external parameter calibration system and method
A calibration system and camera technology, applied in image analysis, instruments, calculations, etc., can solve the problems of difficult observation of angle deviation, short service life, and accurate parking of vehicles, so as to reduce the difficulty of calculation and detection, and avoid Effects of physical damage and accurate origin position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment 1
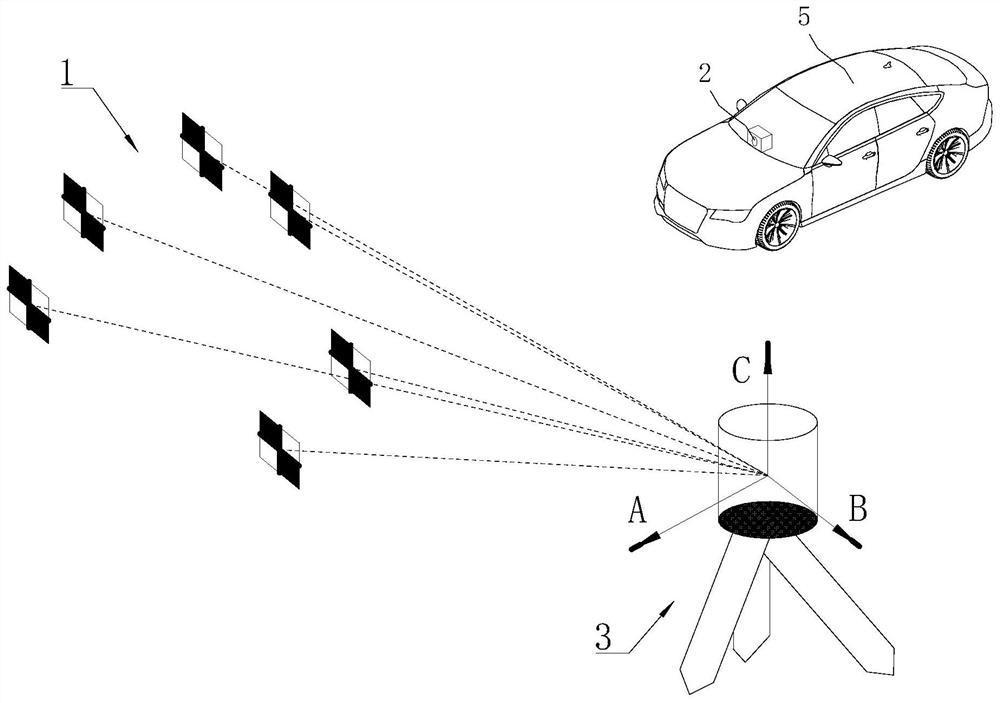
[0062] Specific embodiment 1: please refer to Figure 1-10 A monocular camera external parameter calibration system includes a target 1, a camera 2, a total station 3 and a computing unit 4.
[0063] There are six target 1s in total, and each target 1 has the same structure. Each target 1 includes reflective stickers and corner features. The surface of the reflective sticker is made of reflective material, and the reflective sticker covers the corner features. Corner features are structures that are easily identified by the camera 2 . All targets 1 are in different planes in the world coordinate system. All targets 1 exist at different angles in the world coordinate system. The six targets 1 can solve the 6-DOF position and angle of the camera 2 respectively.
[0064] The camera 2 is a forward-looking camera, and the shooting direction is straight ahead. The camera 2 is fixedly arranged on the target vehicle 5 and is used for shooting an image of the target 1 . All corne...
specific Embodiment 2
[0081] Specific embodiment two, on the basis of specific embodiment one, please refer to Figure 11 A monocular camera extrinsic parameter calibration method, based on the use of a monocular camera extrinsic parameter calibration system, includes the following steps:
[0082] S1. The total station 3 measures the images of the six targets 1, and the computing unit 4 records the coordinate positions mapped on the world coordinate system.
[0083] S2. The total station 3 measures the image of the target vehicle 5, and the calculation unit 4 establishes the vehicle coordinate system according to the coordinate positions of the three key points in the world coordinate system.
[0084] S3. The camera 2 captures all images of the target 1 , and the computing unit 4 records the real pixel positions on the imaging plane of the camera 2 .
[0085] S4. The computing unit 4 preliminarily sets the imaginary coordinates and angles of the camera 2 in the vehicle coordinate system, and estab...
specific Embodiment 3
[0090] Embodiment 3: Different from Embodiment 1, in a monocular camera extrinsic parameter calibration system, the camera 2 is a front-view camera, and the shooting direction of the camera 2 is lateral, that is, the direction of the driving side of the target vehicle 5 . The six targets 1 are placed on the ground on the driving side of the target vehicle 5 , the camera 2 can capture images of the six targets 1 , and the total station 3 can measure the six targets 1 completely.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com