Mechanical arm six-degree-of-freedom real-time grabbing method based on deep reinforcement learning
A technology of reinforcement learning and manipulators, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as instability, achieve a high grasping success rate, solve time-consuming calculations, and overcome cumbersome calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Further illustrate the present invention below in conjunction with accompanying drawing.
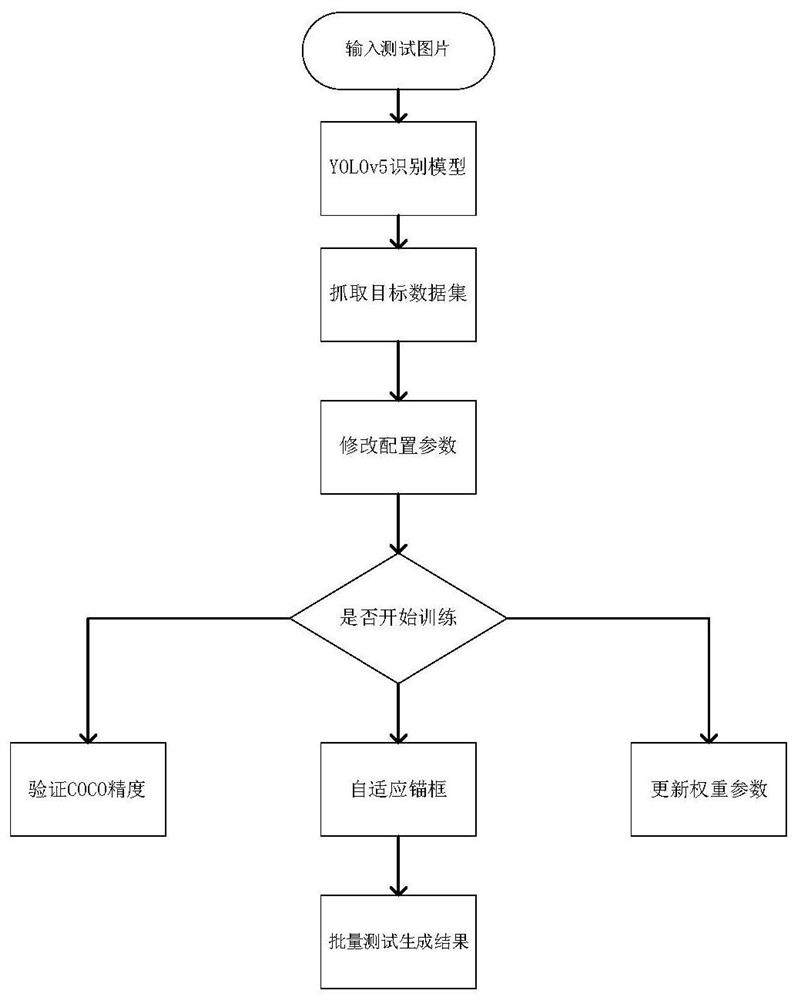
[0044] The real-time grasping method of the mechanical arm based on YOLOv5 pruning network and reinforcement learning of the present invention, the specific process is as follows:
[0045] Step 1: Use the binocular camera to collect the image information of the objects on the grasping platform: First, fix the Intel D415 depth camera vertically at the end of the robotic arm so that it can capture the complete image information of the objects on the grasping platform.
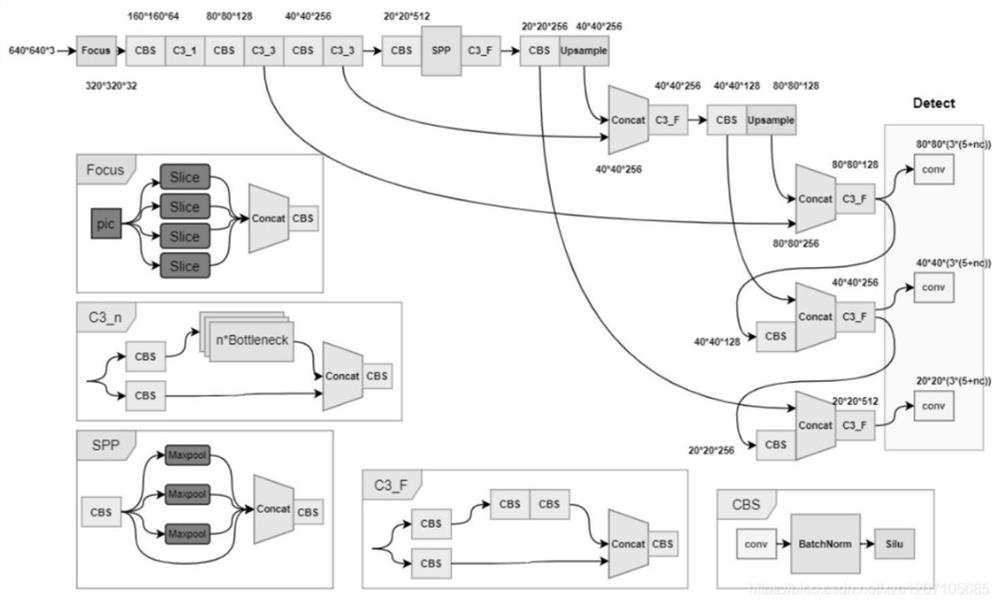
[0046] Step 2, use the YOLOv5 pruning network model to perform target detection training on the image;
[0047] Step 2.1: Since theoretically, the deeper the network, the better its performance. However, the experiment shows that the activation HAN function needs to be derived during the backpropagation process. If the derivative is greater than 1, then as the number of network layers increases, the gradient update ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More