

Mobile robot high-precision positioning method for complex large-scale indoor scene
A technology for mobile robots and indoor scenes, applied in the field of high-precision positioning of mobile robots, can solve problems such as insufficient positioning accuracy, and achieve the effects of precise pose, high-precision robust positioning, and meeting accuracy requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
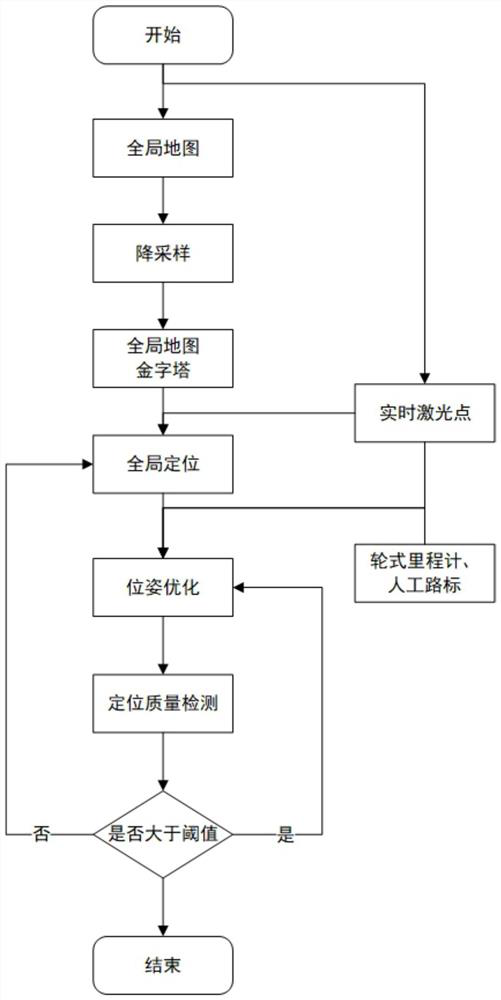
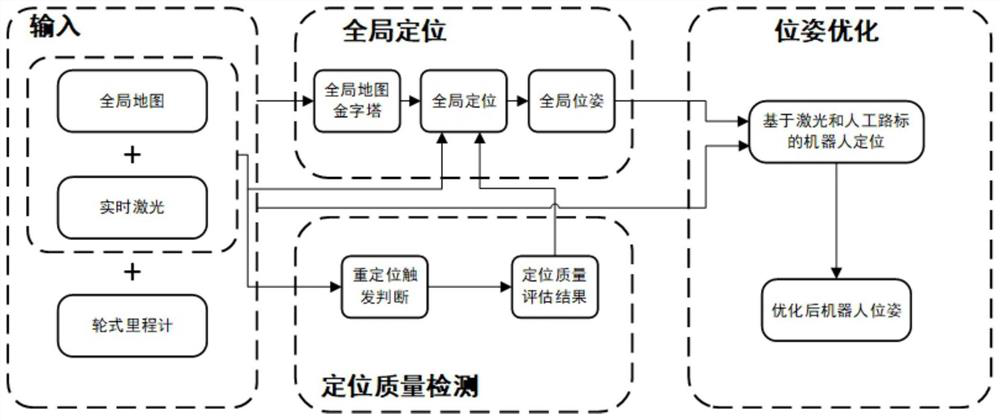
[0076] The invention will be further described below in conjunction with the accompanying drawings and specific implementation examples. Such as figure 2 As shown, the method of the present invention mainly includes three parts: global positioning, pose optimization and positioning quality detection.
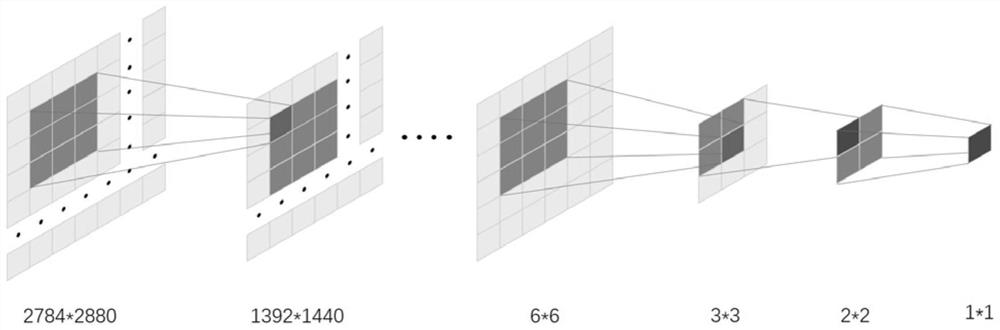
[0077] Global positioning is to process the global map to obtain the global map pyramid to improve the positioning speed and accuracy of the mobile robot in the startup state or in the scene of being kidnapped; the pose optimization part is to use artificial landmarks as an auxiliary to realize the mobile robot in a high dynamic environment. Robust positioning and high-precision positioning of target points; the positioning quality detection part is to detect and monitor the current positioning quality in real time through the matching degree between the current laser and the global map, and feed back to the global positioning part to improve robustness .
[0078] The global ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More