Mobile robot loopback detection method based on deep learning
A mobile robot and deep learning technology, which is applied in the field of mobile robot loopback detection based on deep learning, can solve the problems of recall rate and accuracy rate decline, and achieve the effect of enhancing robustness and good scene changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
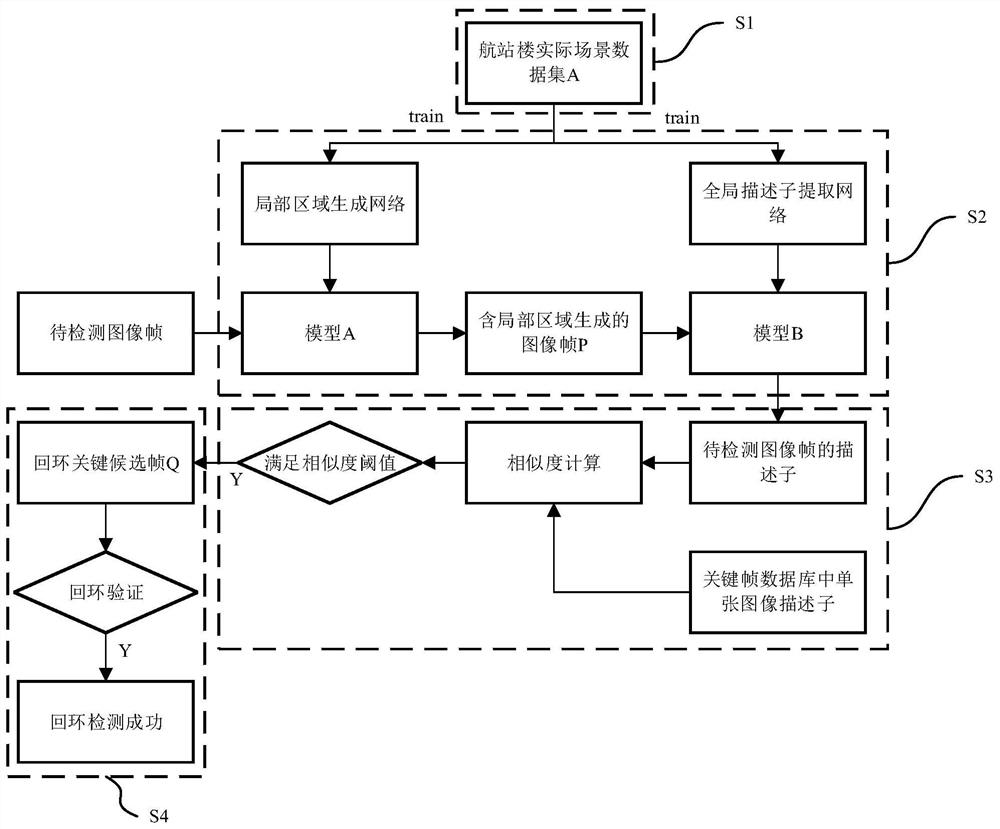
[0038] In the visual SLAM system, pose estimation is a recursive process, that is, the pose of the current frame is calculated from the pose of the previous frame, so the error will be passed on, that is, the cumulative error. An effective way to eliminate accumulated errors is to perform loopback detection. Loopback detection determines whether the robot has returned to the previous position. If a loopback is detected, it will pass the information to the backend for optimization. Loop closure is a more compact and accurate constraint than the backend. Based on this constraint, a globally consistent pose and map can be solved.
[0039] Such as figure 1As shown, the deep learning-based mobile robot loop detection method provided by the present invention includes the following steps in order:
[0040] 1) Use the acquisition device to obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More