Seven-degree-of-freedom series-parallel upper limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, which is applied in the field of rehabilitation robots, can solve the problems of comfort, low training efficiency, and high treatment costs affecting patients' rehabilitation efficiency, so as to increase comfort and rehabilitation efficiency, avoid lack of degrees of freedom, and reduce secondary Effects of Risk of Injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
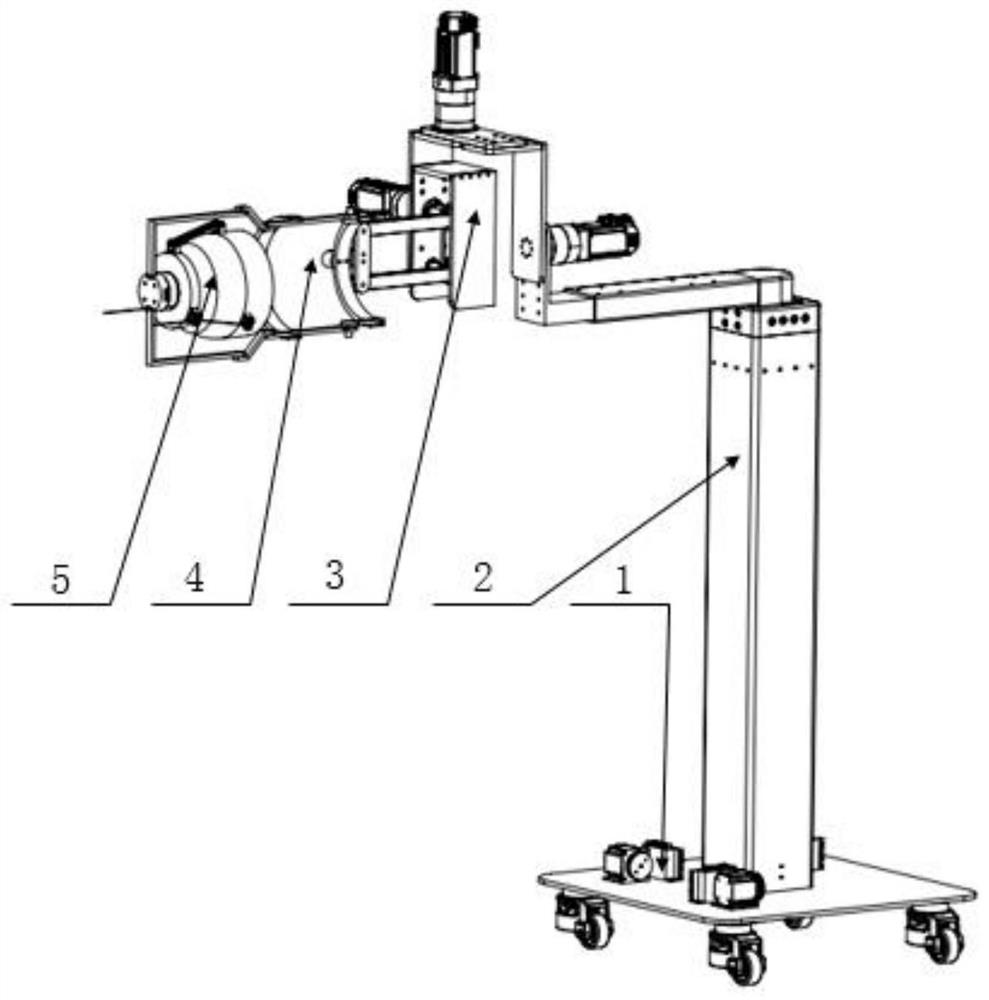
[0030] combine figure 1 , a seven-degree-of-freedom series-parallel upper limb exoskeleton rehabilitation robot, including a driving mechanism (1), a base (2), a shoulder joint exoskeleton mechanism (3), an elbow joint exoskeleton mechanism (4), and a wrist joint exoskeleton mechanism Mechanism (5); the drive mechanism (1) is connected to the bottom plate of the base, the shoulder joint exoskeleton mechanism (3) is connected to the front connecting part of the base (2), and the elbow joint exoskeleton mechanism (4) The middle semi-circular upper arm connecting rod (401) is connected with the upper arm short connector (324), the wrist exoskeleton mechanism (5) is connected with the back of the forearm, and the wrist exoskeleton mechanism (5) holds The handle is connected with the human hand.
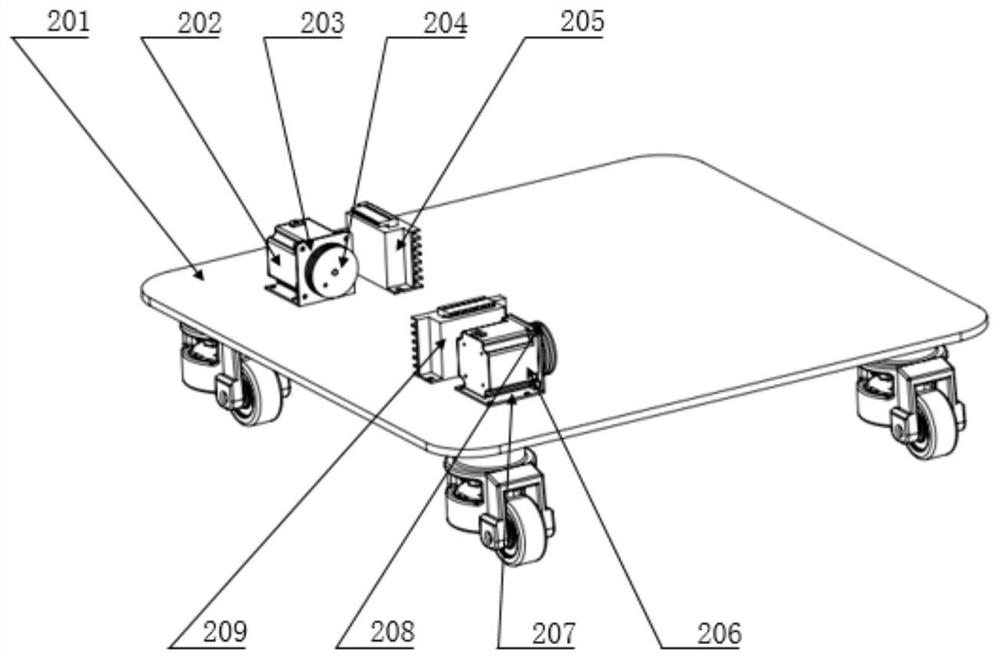
[0031] combine figure 2 , the driving mechanism (1) includes a base plate (201), a motor 1 (202), a motor bracket 1 (203), a rope reel 1 (204), a controller 1 (205), a motor 2 (206), a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com