

Label particle multi-extension target tracking method based on ellipse RHM
A multi-expansion target and particle number technology, which is applied in the field of tag particle multi-expansion target tracking based on elliptical RHM, can solve problems such as inability to achieve track tracking, and achieve the effect of fast calculation speed and high tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
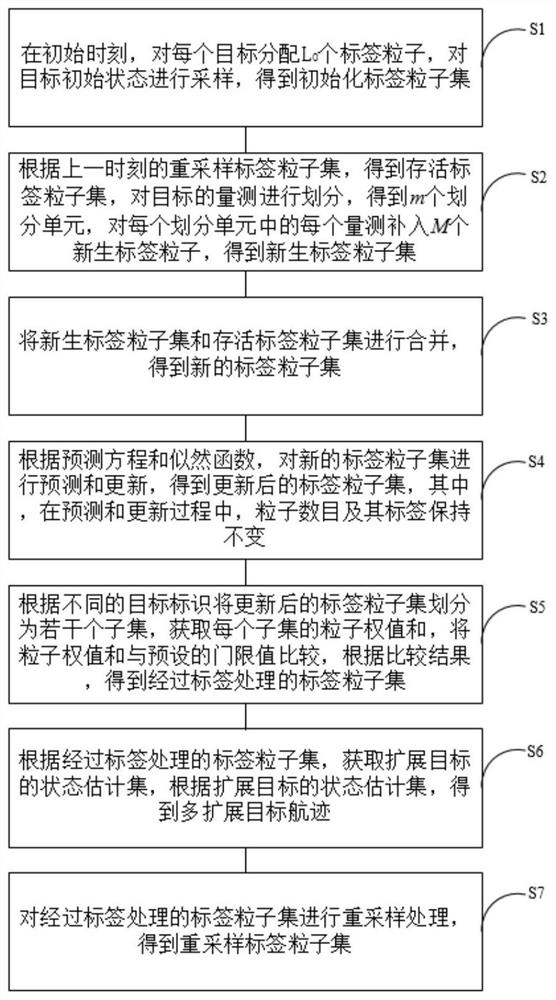
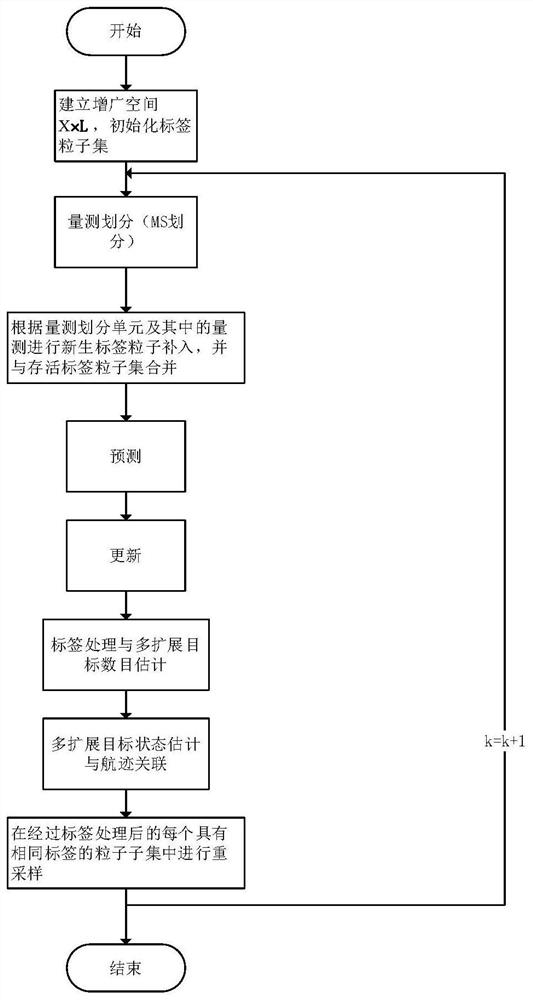
[0100] Please refer to figure 2 with image 3 , figure 2 It is a block flow diagram of an ellipse RHM-based tag particle multi-extended target tracking method provided by an embodiment of the present invention; image 3 It is a flow realization diagram of an ellipse RHM-based tag particle multi-extended target tracking method provided by an embodiment of the present invention. As shown in the figure, the ellipse RHM-based tag particle multi-extended target tracking method of this embodiment includes:
[0101] S1: At the initial moment, assign L to each target 0 label particles, sample the initial state of the target, and obtain the initial set of label particles;
[0102] Initialize the label particle set as:
[0103]
[0104]
[0105] in, Represents the state vector of the i-th particle at the initial moment, Indicates the weight of the i-th particle at the initial moment, Indicates the particle label of the i-th particle at the initial moment, Θ 0 Represe...
Embodiment 2
[0204] In this embodiment, the multi-extended target tracking effect of the ellipse RHM-based tag particle multi-extended target tracking method in Embodiment 1 is described in combination with MATLAB simulation experiments.
[0205] In the simulation experiment of this embodiment, the tracking target is a uniform linear motion target. The observation scene is a two-dimensional plane area with a size of [-600,600]×[-600,600](m 2 ), and add random noise in the observation area as a simulation of the real scene, and design multiple elliptical extended targets with different initial positions, sizes, and motion directions to move uniformly in a straight line in the observation area. The initial state, shape parameters and survival time of each extended target are shown in Table 1.
[0206] Table 1 The initial state, shape parameters and survival time of each extended target
[0207]
[0208] It can be seen from Table 1 that the extended target 1 starts to move from the initi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More