

Surgical tool driving transmission system based on planar motion mechanism and surgical robot
A technology for driving a transmission system and a plane motion mechanism, applied in the field of surgical robots, can solve problems such as complex structure, and achieve the effects of simple principle, easy implementation and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
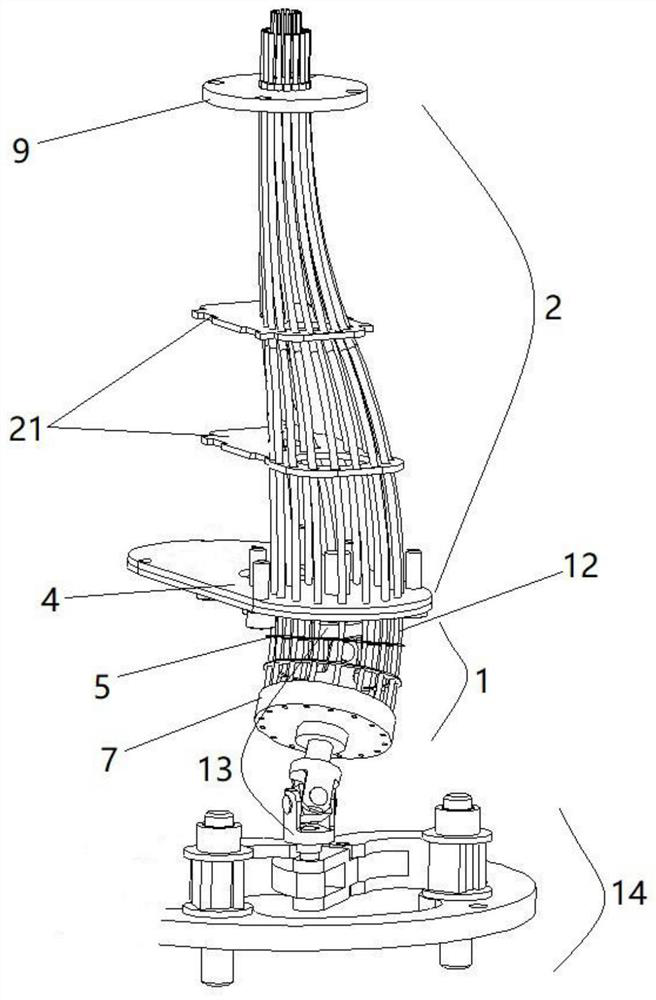
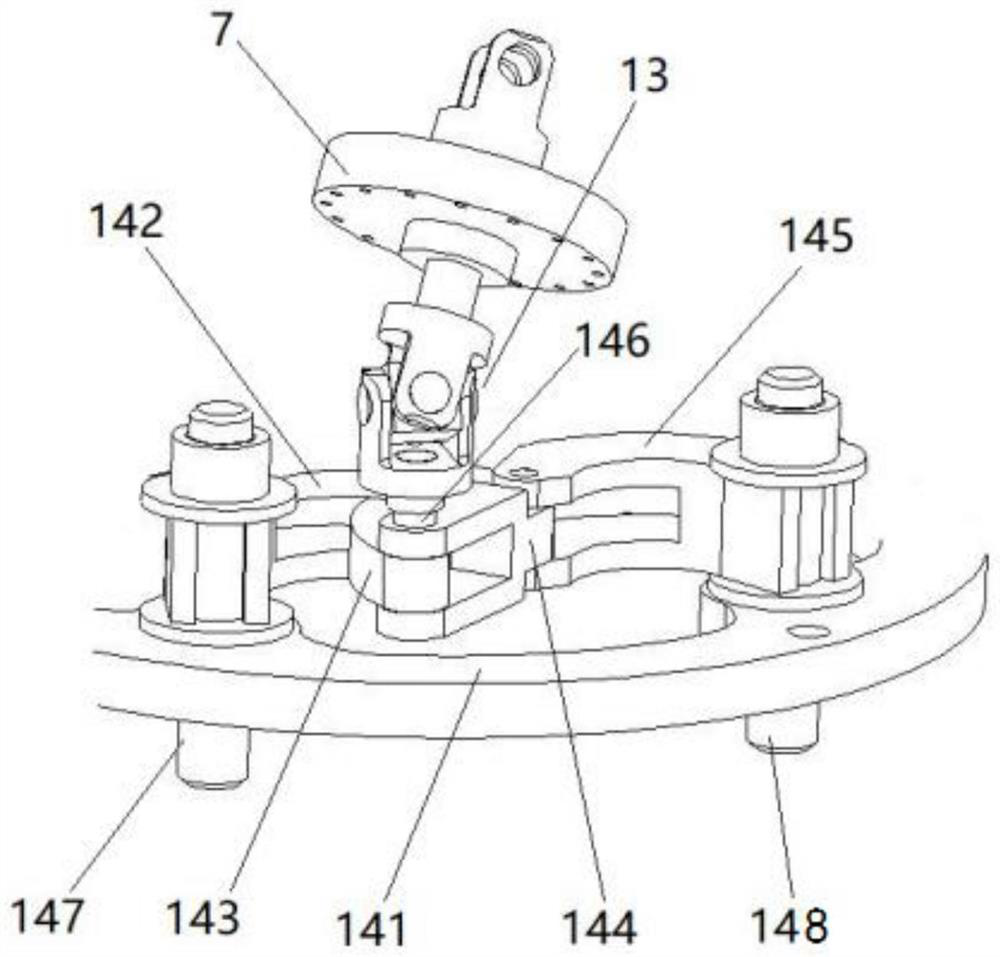
[0043] In this example, if Figure 4 As shown, the driving connection part 13 adopts a double-joint universal joint, which is mainly composed of a first universal joint 131 and a second universal joint 132 connected in series, and the far end and the proximal end of the first universal joint 131 The base plate 4 is connected, the proximal end of the first universal joint 131 is connected with the distal end of the second universal joint 132, and the proximal end of the second universal joint 132 passes through the proximal stop disc 7 and is connected with the proximal stop disc 7 , the part of the second universal joint 132 located on the proximal side of the proximal stop disc 7 forms a free end. At this time, the six connection nodes can be combined as follows: the first connection node uses a fixed connection, the second connection node uses a universal joint, the third connection node uses a cylindrical pair connection, the fourth connection node uses a universal joint, a...
Embodiment 2
[0047] In this example, if Image 6As shown, the driving connection part 13 adopts a double-joint ball joint, which is mainly composed of a first ball joint 133 and a second ball joint 134 connected in series, and the distal end and the proximal end of the first ball joint 133 The base plate 4 is connected, the proximal end of the first ball joint 133 is connected with the distal end of the second ball joint 134 through a universal coupling, and the proximal end of the second ball joint 134 passes through the proximal stop disc 7 and is connected with the The proximal stop disc 7 is connected, and the part of the second ball joint 134 located on the proximal side of the proximal stop disc 7 forms a free end. At this time, the six connection nodes can be combined as follows: the first connection node uses a fixed connection, the second connection node uses a spherical joint, the third connection node uses a cylindrical pair connection, the fourth connection node uses a spherica...
Embodiment 3
[0051] In this example, if Figure 7 As shown, the driving connection part 13 adopts a four-bar hinge joint 135, which is mainly composed of a first link A, a second link B, a third link C, and a fourth link D in series. , the distal end of the first link A is connected to the proximal base plate 4, the proximal end of the first link A is hinged to the distal end of the second link B, and the proximal end of the second link B is connected to the third link C The distal end of the cylinder pair is connected, the proximal end of the third connecting rod C is hinged with the distal end of the fourth connecting rod D, and the proximal end of the fourth connecting rod D passes through the proximal stop disc 7 and is connected with the proximal stop disc 7, The part of the fourth connecting rod D located on the proximal side of the proximal stop disc 7 forms a free end. At this time, the following combination of six connection nodes is taken as an example: the first connection node...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More