

Power transmission line operation aerial robot based on man-machine interaction mixed reality
An aerial robot and mixed reality technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited operation capacity, limited flexibility of operation, limited operating range, etc., to increase the work effect, and to have a large operating space. , The effect of clamping work is simple and convenient
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
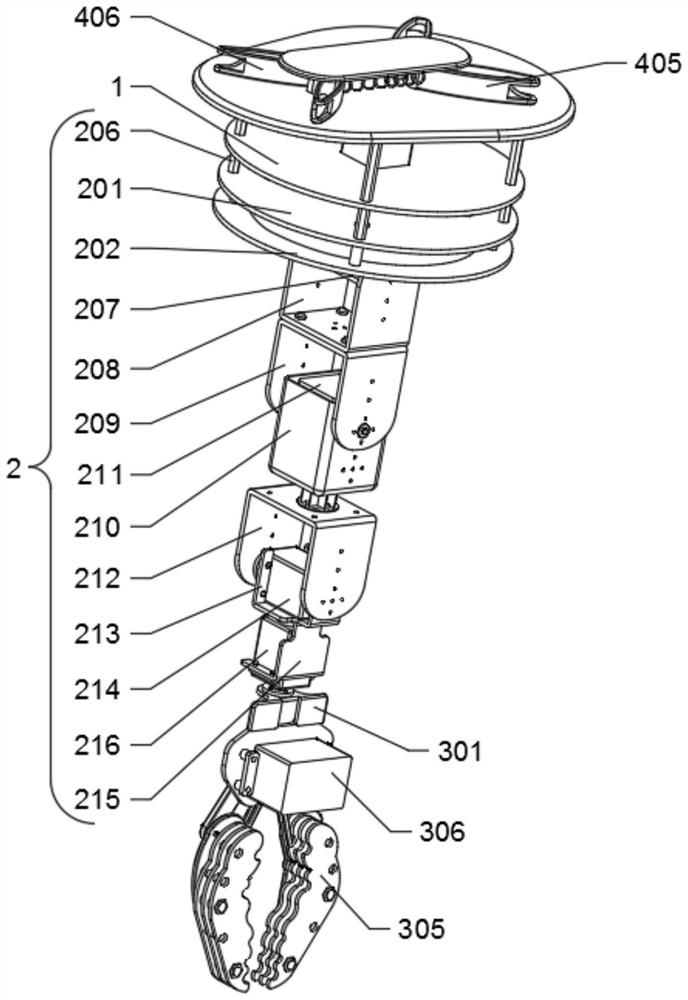
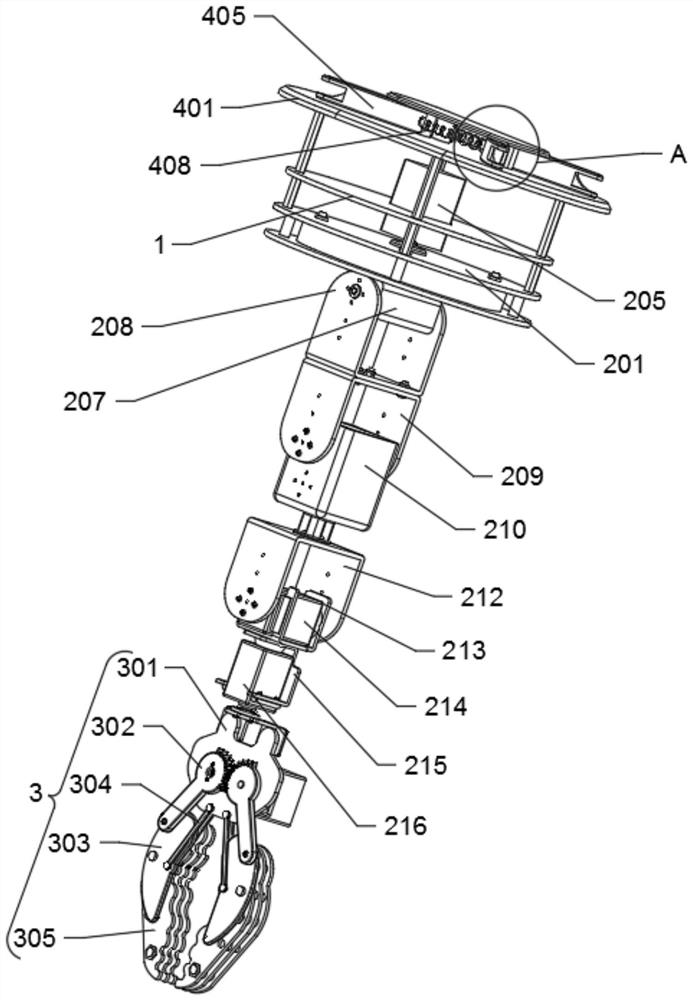
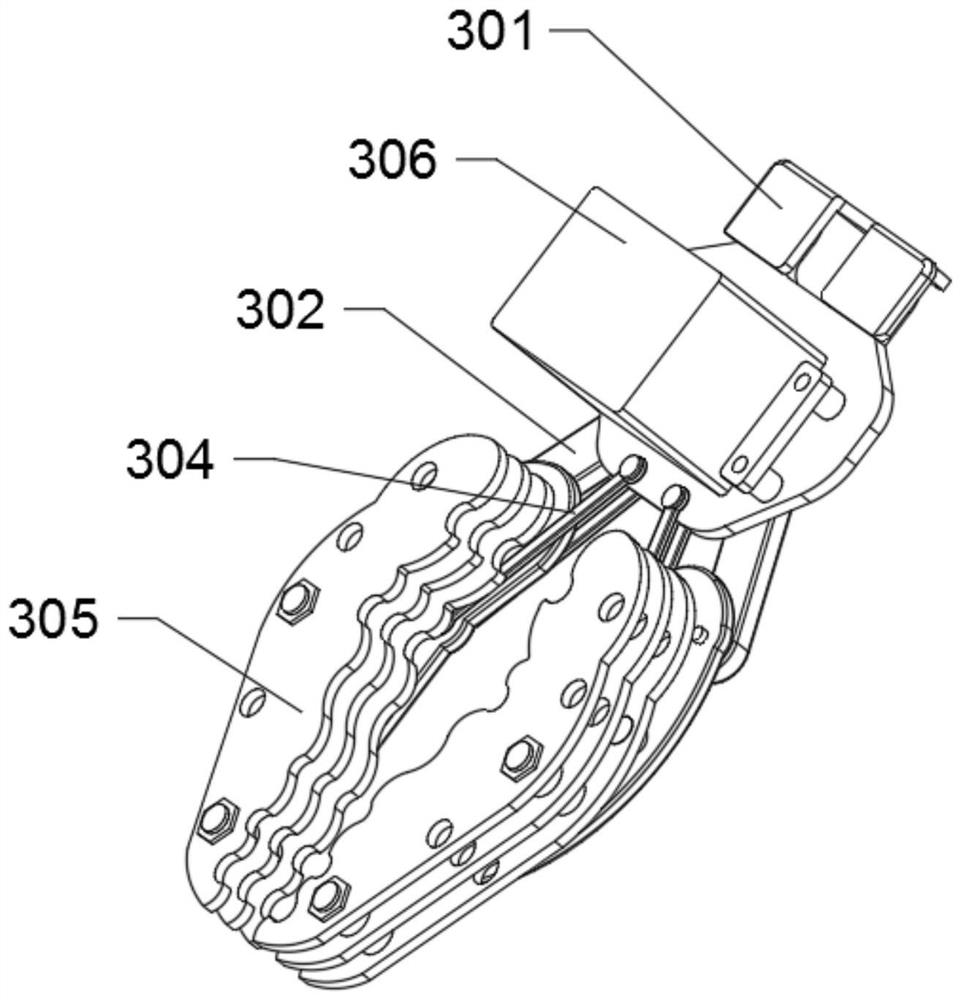
[0036] Example 1, such as Figure 1-6 As shown, the present invention provides a transmission line operation aerial robot based on human-computer interaction mixed reality, including a substrate 1, an operator 5, a teaching robot arm 6, an aerial robot body 7, a binocular camera 8 and a virtual reality helmet 9 , the bottom of the substrate 1 is provided with an adjustment mechanism 2 , the bottom of the adjustment mechanism 2 is provided with a grasping mechanism 3 , and the top of the substrate 1 is provided with a dismounting mechanism 4 .
[0037] Let's talk about the specific settings and effects of its adjusting mechanism 2, grasping mechanism 3 and dismounting mechanism 4 in detail below.
[0038] Such as Figure 1-2 and Figure 4 As shown, the adjustment mechanism 2 includes a disk 201, the bottom of the disk 201 is fixed with a chassis 202 by screws, the bottom of the disk 201 is fixed with a hollow tube 203 by screws, and the inside of the hollow tube 203 is connec...
Embodiment 2
[0050] Example 2, such as Figure 9-10 As shown, the operator 5 is used to use the control equipment to control the aerial robot to work, the teaching robot arm 6 is used for the operator 5 to control the mechanical arm installed on the aerial robot in real time, the teaching robot arm 6 is controlled by the operator 5, and the aerial robot body 7 is a combination of an aerial drone and a mechanical arm. The aerial robot body 7 is connected to the teaching mechanical arm 6. The binocular camera 8 is used to record and send real-time environmental information. The binocular camera 8 is installed at the bottom of the aerial robot body 7 The virtual reality helmet 9 is used to receive the environmental information sent by the binocular camera 8 in real time and feed it back to the operator 5. The virtual reality helmet 9 is connected to the binocular camera 8 with a signal, and the virtual reality helmet 9 is worn on the head of the operator 5 .
[0051] The effect achieved by it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More