

Robotic fish path tracking method and device fusing with BP-RBF neural network
A BP-RBF and BP neural network technology, applied in the field of bionic fish, can solve problems such as difficulty in suppressing chattering and overshoot, lack of high-quality tracking control effect in robotic fish, etc., to achieve good control quality, reduce external interference, and control accuracy. improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
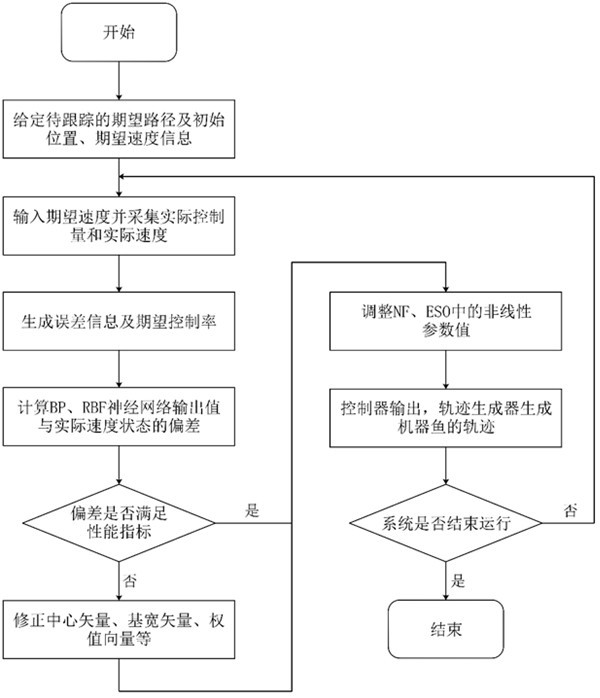
[0076] Such as figure 1 As shown, the present embodiment is a robotic fish path tracking method for merging BP-RBF neural network, comprising the following steps:
[0077] Step 1, given the initial position, expected velocity V(t), and expected path S of the robotic fish to be tracked; then input the initial position, expected velocity V(t), and expected path S into the control information generation module; the control information generation module receives The collected actual speed and actual control quantity are used to generate error information through the expected speed V(t) and the expected path S, and the error information includes the tangential error , normal error and attitude tracking error (yaw angle error) Ψ; then generate the corresponding expected speed control rate v according to the error information 0 (t), desired path control rate r d ; Then put the desired speed control rate v 0 (t), desired path control rate r d Input ADRC control module;
[007...
Embodiment 2
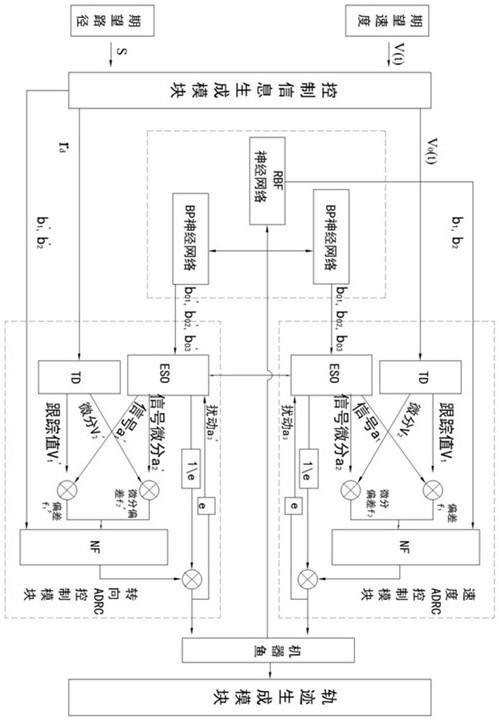
[0116] Such as image 3 and Figure 4 As shown, the difference between this embodiment and Embodiment 1 is that the ADRC control module includes a speed ADRC control module and a steering ADRC control module.
[0117] Such as Figure 5 ,Such as Figure 6 As shown, the speed ADRC control module receives the desired speed control rate v 0 (t) and control the robotic fish, which includes a first tracking differentiator, a first nonlinear combination and a first extended state observer;
[0118] The steering ADRC control module receives the desired path control rate r d And control the robotic fish, which includes a second tracking differentiator, a second nonlinear combination and a second extended state observer.
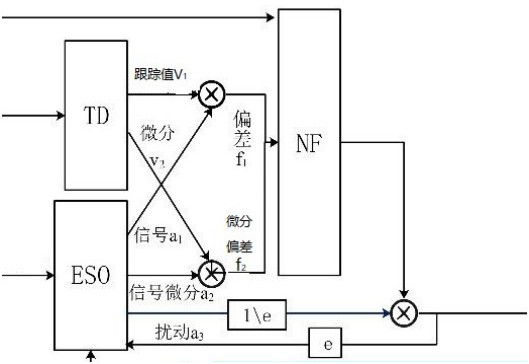
[0119] combine Figure 6 , Figure 7 and Figure 8 As shown, the steps of speed control in step 1, step 2 and step 3 specifically include:
[0120] Set the desired speed control rate v 0 (t) Input speed ADRC control module, the first tracking differentiator co...
Embodiment 3
[0124] Such as figure 2 As shown, the present embodiment adopts the robotic fish path tracking device of the fusion BP-RBF neural network of the method in embodiment 1 and embodiment 2, which includes:
[0125] Control information generation module, which is used to generate error information, desired speed control rate v 0 (t), desired path control rate r d ;
[0126] ADRC control module, which includes tracking differentiator (TD), nonlinear combination (NF), extended state observer (ESO);
[0127] A parameter optimization module, which includes a BP neural network and an RFC neural network, the BP neural network optimizes the extended state observer, and the RFC neural network optimizes a nonlinear combination;
[0128] The trajectory generation module is used to generate the real-time position of the robotic fish and form a trajectory.
[0129] The ADRC control module includes a speed ADRC control module and a steering ADRC control module,
[0130] The speed ADRC con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More